| Ť�������ڙC�����P���ϵđ��� |
| ��Դ�����c������5038�Ρ����r�g��2022/2/4 11:25:55 |
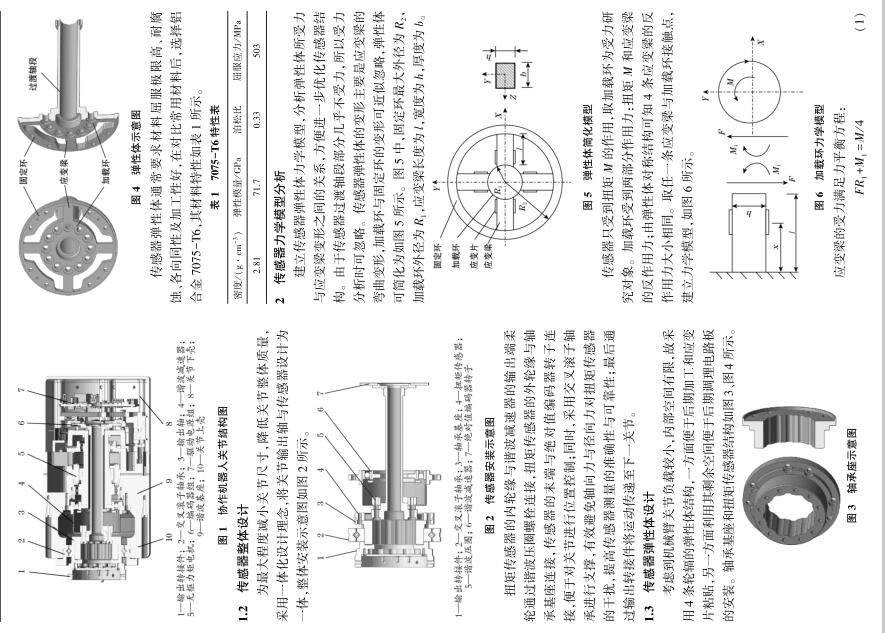
| Ť�������ڙC�����P���ϵđ��� ��_���f���C���˵İ�ȫ�ԣ���Ҫ�څf���C�����P��̎���bŤ�����������څf���C���������P���ߴ�������ؓ�d���^С����Ҫһ�N�Y���o�����`���ȸߵ�Ť�������� ���Q�@һ�y�}���ڷ������y݆ݗʽŤ�������Ļ��A�ϣ������һ�N�C�����P��ݔ���S�͂�����һ�w���ĽY�����������������w�������Wģ�͡����Wģ�ͣ�ʹ��푑��淨�������w�Y�������M�Ѓ��������� �£��⁃�£������ ���M��׃���OӋ��Ȼ������ �գǣ� �ȣ���������� �M������Ԫ������C�� �Y��������������Ă������������õĿ��^�d���������Զȼ��`���ȡ� ��������������ɣ� ������ ���� �������� ����� �������� ��� ����� ���������������� ����������� ��� ���������� ���� ��������� ��������� �������� ��� ����� �������� ��� �������������������� ���������ԣ������ �������� ������� ��������� ������ ���� ����� ��������������� ���� ������� ����� ���� ���������������� ������ ���������� ������ ���������⁃������ ���� ������� ����䣮�ԣ� ������� ������ ������������� ������������� �������������� ��� ���������� ������ ���� ������� ����� ��������� ������ ��� ���������� ��� ������������������ ������⁃����� ��������� ������ԣ�� ������������ ������� ���� ����������������� ������� ���� ����� ������� ������ ������������䣮�ң������� �����⁃����� �������������� ����� ����������� ���� ������������ ����� ������� ��������������� ������������֣�������� ������ ��������� ��� �£��⁃�£������ ������ �ԣ��� �գǣ� �ȣ���������� ����� ������ ���� �������� ��������� �������������� ���������������ԣ�� ���������� ����� ����� ������������� ������� ���� ����� ������⁃������⁃����� ������������������������� ���� ����������������� �f���C�����������d�a�I���� �ۣ��� ����ҕ�錍�F�Ї����죲������ ���P�I �ۣ������� �� �f���C���������c�˅fͬ���������{��ȫ�� �ۣ��� �����`����Ť�������܉�ʴ_�y���C�����P��������r���Ķ��_�����İ�ȫ�ԡ� ����Ϋ@����Ă����������w�Y��һֱ���OӋ�y�} �ۣ��� �� ���°���ͨ�^����׃Ƭճ�N���C���p������݆�Ϝy��Ť�أ�������݆�������y��Ӱ푺ܴ� �ۣ��� ���īI�ۣ����OӋ�ˡ������x������ʽ���������ܜp���P������ײ�����īI�ۣ����OӋ��һ����w���������`���ȸߵ������w�Y�����s�y�Լӹ������_�_���OӋһ��б��o����Ť���������y����׃���ļ��Б�׃����׃�^С �ۣ��� ���Y�Ȍ�݆ݗʽ�Y���M���˃����OӋ���ӹ��Ժõ��������P���S��ߴ� �ۣ����� �� ������Ԕ���������y�P��Ť�������y��ԭ���Ļ��A�ϣ�����һ�w���OӋ��������Ť�������cݔ���Sһ�w���Y�����������P���S��ߴ磬������P��ؓ�d�� ���رȡ� ͬ�r����������Ԫ���漰푑��淨���õ���һ�NŤ�����������w�ă��������� ����Ť����������������Y���OӋ ��������������������� �D�� ����һ���f���C���˵��P���Ȳ��Y���������Ă������OӋ�đ��Ì��� �����P���⚤���C���p�����Ѵ_���� �� �� �� �� �� �� �� �� �� С �� �P �� �� �� �� ������������ ����������݆������˨�A���ľ�ֱ���� ���� ���������߶ȣ��� ������ �����Cе�۹��r����Ť���������̞飰������ �Ρ������Ҿ��У��������Ŀ��^�d���������������ܳ��ܣ��� �Ρ��� ��˲�r�d�ɣ��d��ጷź������Կ����������� �D �����f���C�����P���Y���D �����������������w�OӋ �����̶ȜpС�P���ߴ磬�����P�����w�|��������һ�w���OӋ������P��ݔ���S�c�������OӋ��һ�w�����w���bʾ��D��D �� ��ʾ��
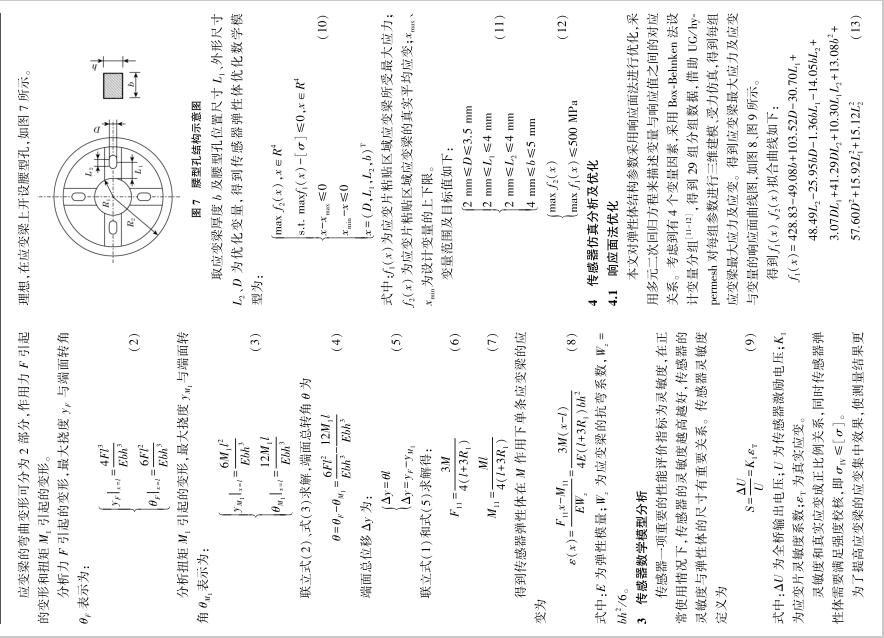
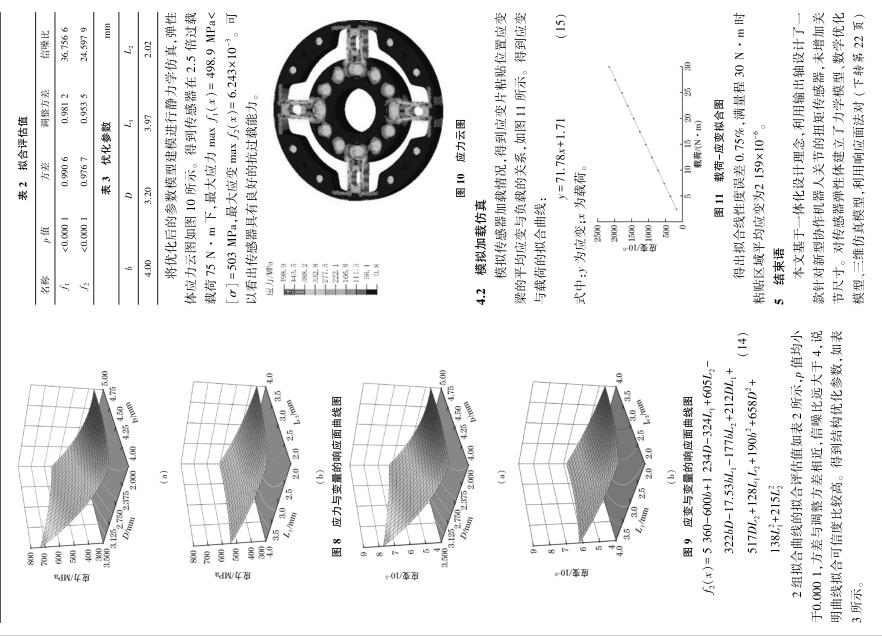
Ť�������ă�݆���c�C���p������ݔ������݆ͨ�^�C����Ȧ��˨�B�ӣ�Ť����������݆���c�S�л����B�ӣ���������ĩ���c�^��ֵ���a���D���B�ӣ����ڌ��P���M��λ�ÿ��ƣ�ͬ�r�����ý���L���S���M��֧�Σ���Ч�����S�����c��������Ť�������ĸɔ_����߂������y���Ĝʴ_���c�ɿ��ԣ����ͨ�^ݔ���D�Ӽ����\�ӂ��f����һ�P���� �������������������w�OӋ ���]���Cе���P��ؓ�d�^С���Ȳ����g���ޣ��ʲ��� �� �l݆ݗ�ď����w�Y����һ������ں��ڼӹ��͑�׃Ƭճ�N����һ����������ʣ����g���ں����{���·��İ��b�� �S�л�����Ť�������Y����D�����D�� ��ʾ�� �D ���������wʾ��D
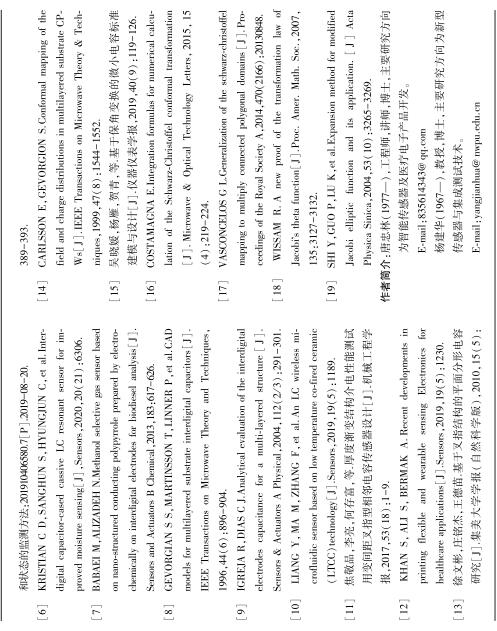
�������������Wģ�ͷ��� ���������������w���Wģ�ͣ����������w�������c��׃��׃��֮�g���Pϵ�������Mһ�������������Y���� ���ڂ������^���S�β��֎����������������������r�ɺ��ԡ� �����������w��׃����Ҫ�Ǒ�׃���ď���׃�Σ����d�h�c�̶��h��׃�οɽ��ƺ��ԣ������w�ɺ�������D �� ��ʾ�� �D �� �У��̶��h����⏽�� �� �� �����d�h�⏽�� �� �� ����׃���L�Ȟ� �죬���Ȟ� �裬��Ȟ� �⡣ �D ���������w����ģ��
 |
| ��ˢ����桿�������ղء�����ӡ���ġ� ���P�]���ڡ� |
| ��һƪ���C늜yԇ���g����CAI�ķ�����ע���������һƪ���ױP�y���CУ���b�û��Еr�g���ٶ�У�� |