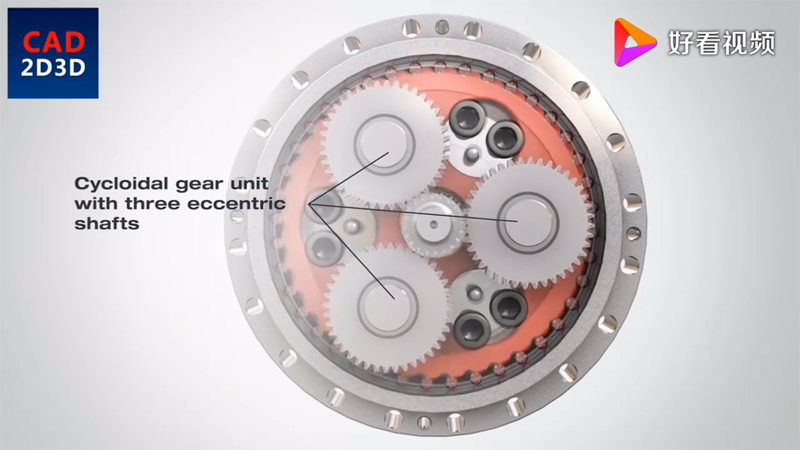
���˄ڂ�Ɲ������1926�ꄓ���Ե������һ�N���X�����ǂ��әC������������[�������X�������ģ��@�������ڵ��݆�[�����ǂ��ӡ����ڃɂ������X݆������һ���������݆����ʽ���@�N����Ҳ���Q��[���݆�����X݆���ӡ�
RV������һ�N���d�Ă��ӷ�ʽ�������ڂ��yᘰ����ǂ��ӵĻ��A�ϰlչ�����ģ����H�˷���һ��ᘔ[���ӵ�ȱ�c�������������w�eС�������p�����ӱȷ��������LЧ�ʸߣ�����ƽ����һϵ�Ѓ��c���ǙC���˞��P�I�ęCе�Y��֮һ��
����863Ӌ�������������c���˵ļ��gƿ�i���C�������к����㲿���У��p�ٙC���P�I���p�ٙC�ڹ��I�C���˿��w�ɱ���38%���p�ٙC���ŷ�늙Cռ50%�ijɱ�����Ҫ���M�ڞ����� RV�p�ٙC�Ѓɼ��p�٣�ǰ����һ�������X݆�p�ٙC���˜p�ٙC��ݔ���S��12�X�����Ӄɂ�42�X�Ĵ��X݆���Ӝp�ٱȞ�3.5�������p�ٞ����X݆�p�ٙC�������X݆����݆���S�D��ݔ���S�D��3.5Ȧ�����S�D��һȦ�����S��ƫ�IJ��ְ��b�L��S�У�ͨ�^�L��S���b���1��RV�X݆��RV�X݆�ڃɂ�݆�Ď��������A�ܔ[�ӣ�Ȼ���b���2��RV�X݆���ɂ�RV�X݆�����e�ĈA�ܔ[�ӡ�
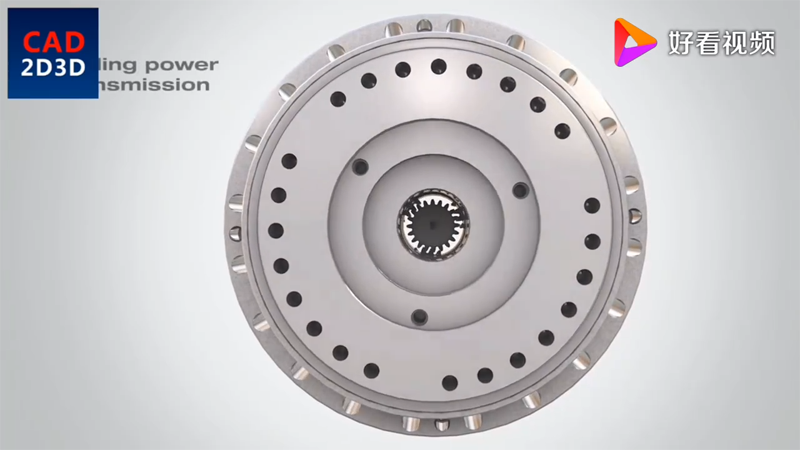
�A�F�L���S�С��|Ƭ���A�F�L���S�С���X�⚤�X����40��RV�X݆�X����39�����⚤�ȂȃH��RV�X݆����һ����X�����S�DһȦ����X�⚤���Dһ���X�����Զ���ᘄ��X݆�p�ٙC���p�ٱȞ�40�ȣ�һ��3.5�ȣ�����40�ȣ��Ȕ���˵ó��˜p�ٙC�p�ٱȞ�140��
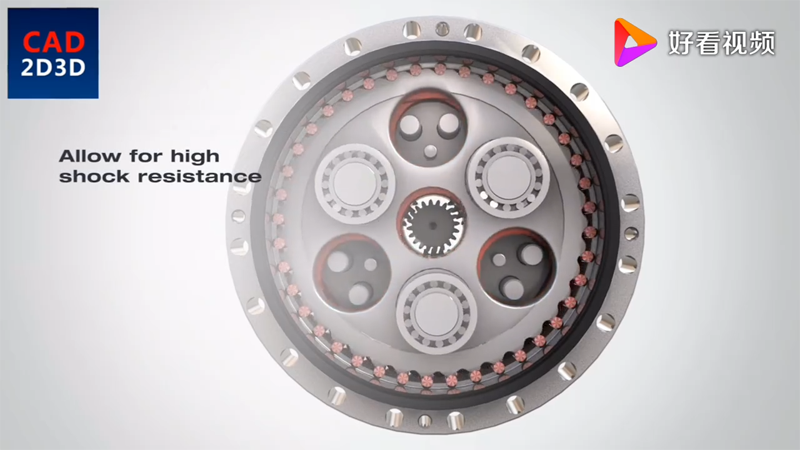
�ǽ��|�S�С�����֧�ܡ��S�п��ɡ� RV�p�ٙC���ɔ[���݆������֧�ܽM�ɡ����w�eС�����_��������Ť�ش�λ���_����λ���ȸߣ����С���p�ٱȴ���T�����c�����V�������ڹ��I�C�����P�����C�����ӣ��t���z�y�O�䣬�l�ǽ���ϵ�y���I��
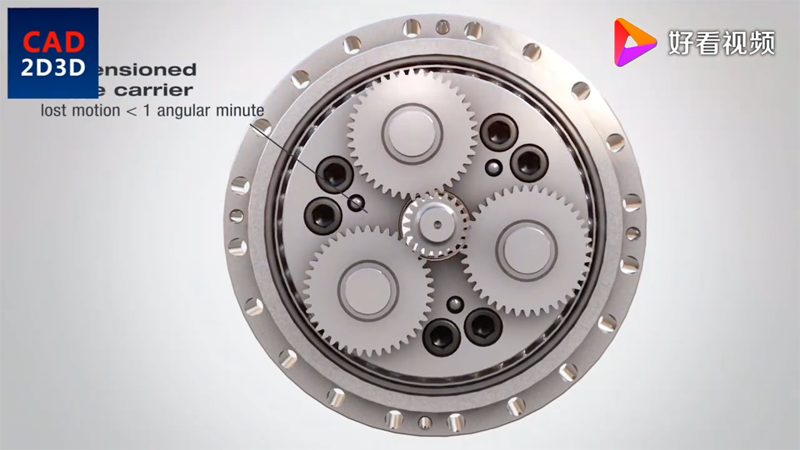
���^�C�����г��õ��C�����Ӿ��иߵĶ��ƣ�ڏ��ȣ����Ԅ��Ⱥ͉��������һس̾��ȷ����������C�����ǘ��S��ʹ�Õr�g���L���\�Ӿ��Ⱦ͕��@�����͡����������S�����Ҹ߾��ȵęC���˂��Ӷ�����RV�p�ٙC������@�NLV�p�ٙC�����M�C���˂���������uȡ���C���p�ٙC�İlչڅ�ݡ�
RV�p�ٙC�ǙC�������P�I�ęCе�Y��֮һ��Ŀǰ�҇�RV�p�ٙC��Ҫ���M�ڞ�����RV�p�������нY���o�������ӱȴ����С�������ͣ��ܺĵ͵ȃ��c��RV�p�ٙC��һ�������X݆�p�ٙC��ǰ����һ���[���݆�p�ٙC�ĺM�ɡ��ŷ�늙C�����D�Ǐ�ݔ���X݆��ֱ�X݆���ӣ�ݔ���X݆��ֱ�X݆���X���Ȟ�һ���p�ٱȣ������Sֱ�B����ֱ�X݆���cֱ�X݆�����D��һ�ӣ������S��ƫ���S��ͨ�^�L��S�У����b�˃ɂ�RV�X݆�S�������S�����D��Ҳ������ƫ���\�ӣ�һ�����ښ��w�Ȃȵ���X�����RV�X݆���X����һ����X�۵Ⱦ����С������S���Dһ��RV�X݆�c��X�۽��|��ͬ�r��һ��ƫ���\�ӣ��ڴ˽Y����RV�X݆�ɫ�c�����S�S�����D�����෴�ķ������Dһ���X݆���x���@���D�ӱ�ݔ�����ڶ��p�ٱȵ��S���S�̶��r���⚤�ȳɞ�ݔ���ȣ������S�����D���Ǹ�����X�۵Ĕ�����^�ֵģ����p�ٱ��ǵ�1���p�ٵĜp�ٱȺ͵ڶ��p�ٵĜp�ٱȵij˷e��
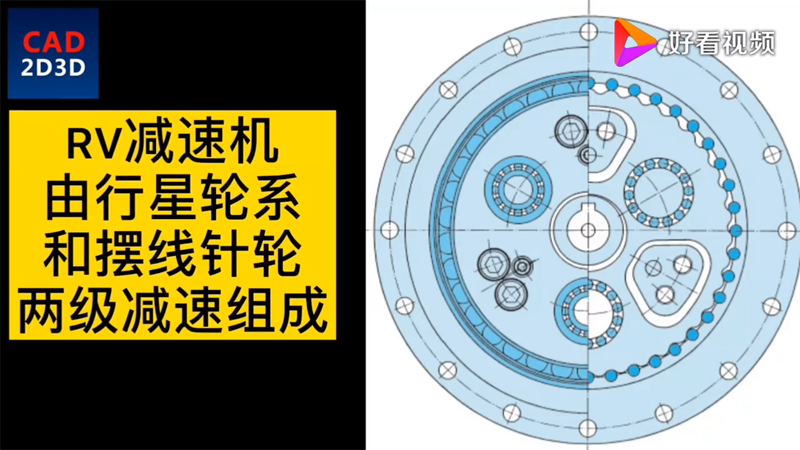
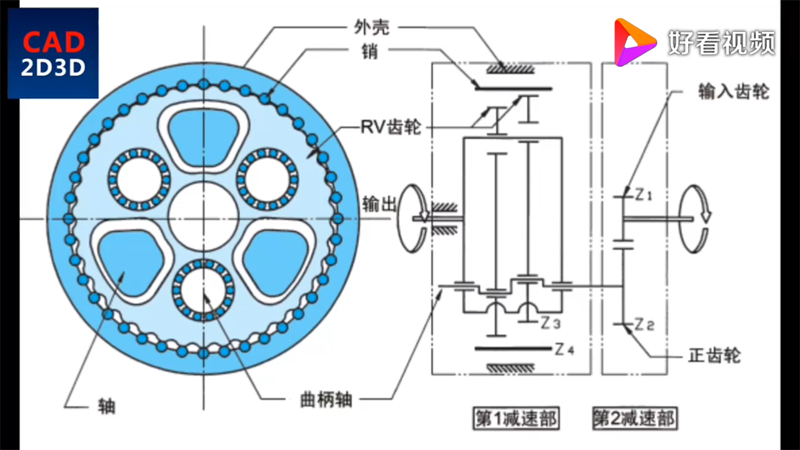
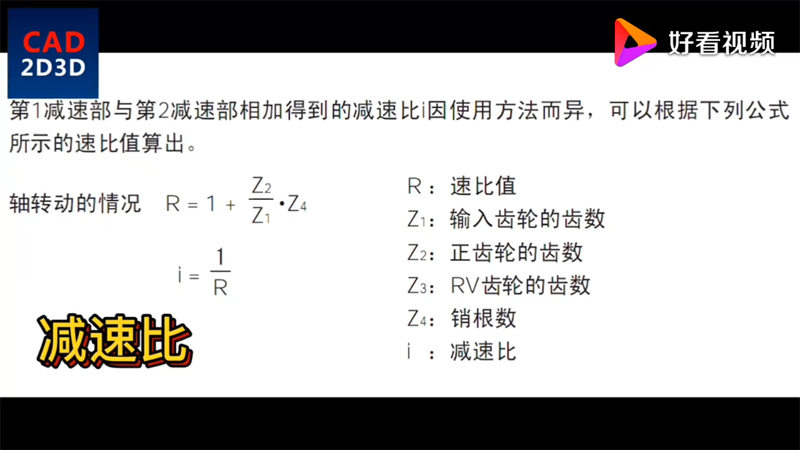
RV�p�ٙC������݆ϵ�͔[���݆�ɼ��p�ٽM�ɣ�RV�X݆���N��һ���X�������S���DһȦ��RV�X݆���Dһ���X�ࡣ �����X݆�͔[���݆�ɼ��p�ٽM�ɡ���һ�p�ٲ��c�ڶ��p�ٲ���ӵõ��Ĝp�ٱ�i��ʹ�÷������������Ը������й�ʽ��ʾ���ٱ�ֵ����S�D�ӵ���r.
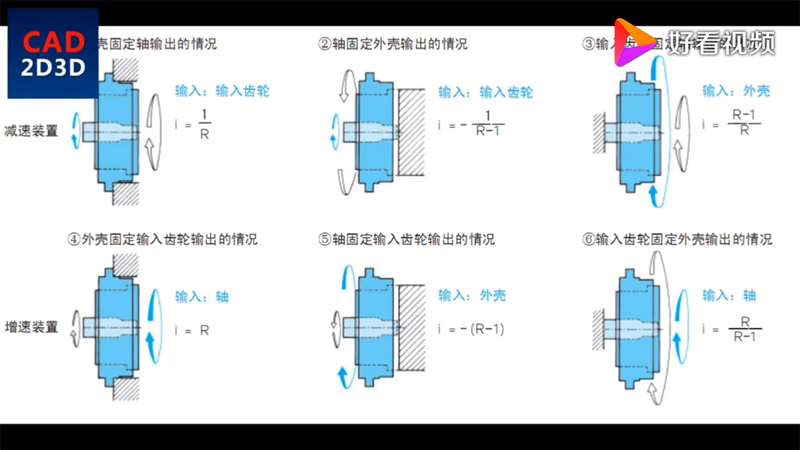
RV�p�ٙC��6�N���b��ʽ��
1.�⚤�̶��Sݔ����r
2.�S�̶��⚤ݔ������r
3.ݔ���X݆�̶��Sݔ����r
4.�⚤�̶�ݔ���X݆����r
5.�S�̶�ݔ���X݆ݔ�����r
6.ݔ���X݆�̶��⚤ݔ������r
3�������X݆��ͬݔ���X݆�ӣ������X݆���������S���D����������RV�X݆���෴�������D��
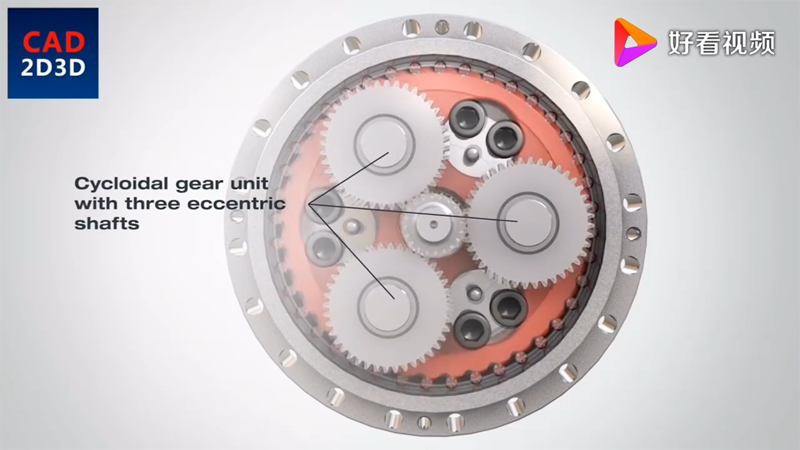
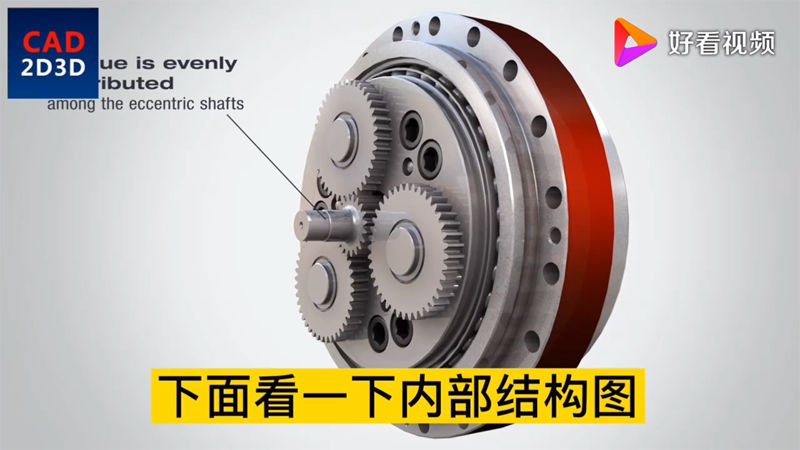
���濴һ�Ȳ��Y���D��RV�p�ٙC��2���p�ٽM�ɣ�һ����ݔ���X݆������݆�p�٣�����һ�����ǔ[���݆�p�١�


1��RV�p���������c��
2��RV�p�����ĽY����
3��RV�p�����Ă���ԭ��
4��RV�p�ٙC�����^��������
RV�p�ٙC���ڔ[���݆���ӵĻ��A�ϰlչ������һ�N���͂��ӡ�RV����ϵ�y�����w�eС�������p�����ӱȷ�������Ч�ʸߵ�һϵ�Ѓ��c���Ȇμ��Ĕ[���݆���ǂ���ϵ�y���и�С���w�e������^�d��������ݔ���S���ȴ�����ڇ������ܵ��V������ҕ���ڙC���˵Ă���ϵ�y�У����ںܴ�̶�����RV����ȡ���μ��Ĕ[���݆���ǂ��Ӻ��C�����ӡ�
1RV�p�ٙC�����c��
һ���ӱȷ�������Ч�ʸߣ�
����Ť�D���ȴ��h����һ��[���݆���ǜp�ٙC��ݔ���C��
�������~���D���£����Իز�С��
�ģ����fͬ���D���c���ʕr��RV�p�ٙC�^�����p�ٙC���w�e��С��
RV�p�ٙC�ĽY����
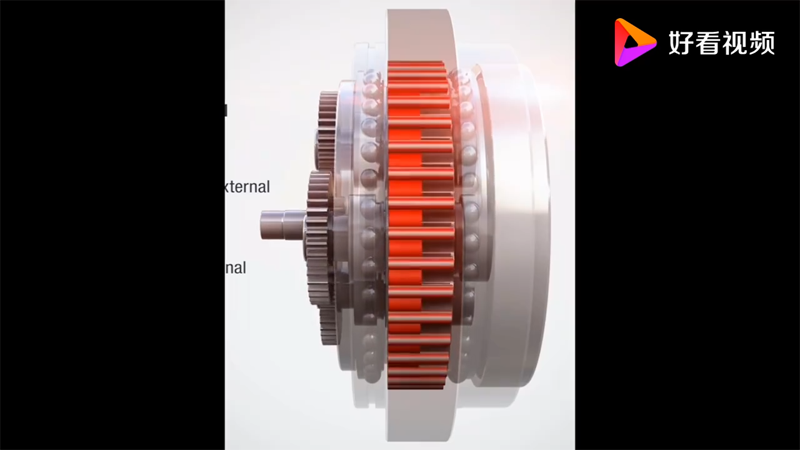
RV�p�ٙC���ͷ⡢�S����X�����S�С�RV�X݆���ͷ⡢��˨���m��ݔ�뻨�I�S�M�������S��늄әC���m�����g���m���⚤�����X݆��ݔ���S���m��ݔ���X݆���M�ɡ�
RV�p�ٙC�ĽY����
1��ݔ���X݆�S��ݔ���X݆�S�Á���fݔ�빦�ʣ����c�u�_������݆�������ϡ�
2������݆�����X݆�������c���S�����ɂ�����������݆����ֲ���һ���A���ϣ����ʷ������ã�����ݔ�빦�ʷֳɎ�·���f�o�[���݆�C����
3�������S�������S�ǔ[��݆�����D�S
4���[��݆�����ˌ��F��������ƽ�⣬һ����Ãɂ���ȫ��ͬ�Ĕ[���݆��
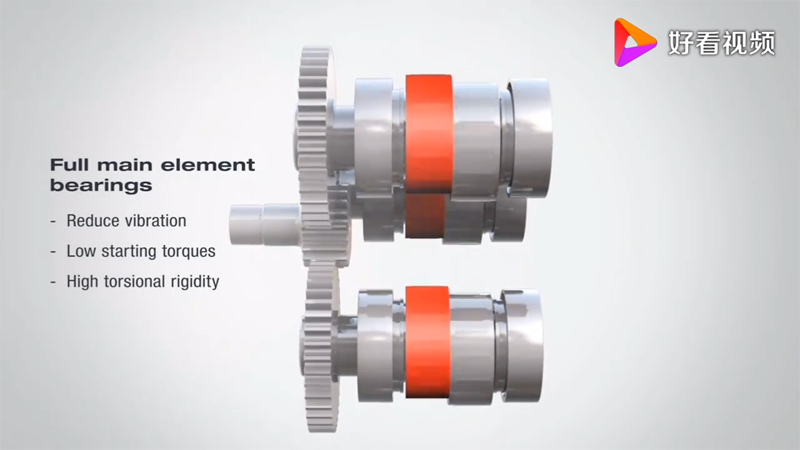
5����X����X�c�C�ܹ���һ����݆���w��
6�����ԱP�����ԱP�DŽ������әC����
7��ݔ���P��ݔ���P��RV�p�ٙC�c���ĄәC���B�ӵĘ�����ݔ���P�̈́��ԱP�D�ӳɞ�һ�����w��ݔ���\�ӻ������
����RV�p�ٙC�Ă���ԭ��
���ɝu�_���A���X݆���ǜp�ٙC�͔[�݆���ǜp�ٙC�ɲ��ֽM�ɡ�
ԓ�Y�����D�����ɂ��������ǙC����
X1��X2��ݔ����A������݆1��ݔ����B��ݔ���P6����W6=W4.
֧�м�E���݆7���u�_������2�c�D�ۣ������S��3�����o����d
�ģ�RV�p�ٙC�Ă����^������
��һ���p�ٵ��γɈ���늙C�����D�\�����X݆�S���f�o�ɂ��u�_������݆���M�е�һ���p�١�
�ڶ����p�ٵ��γ�
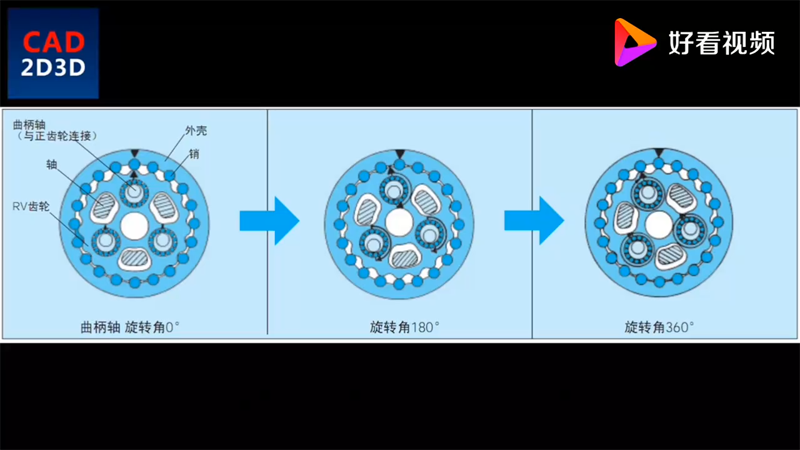
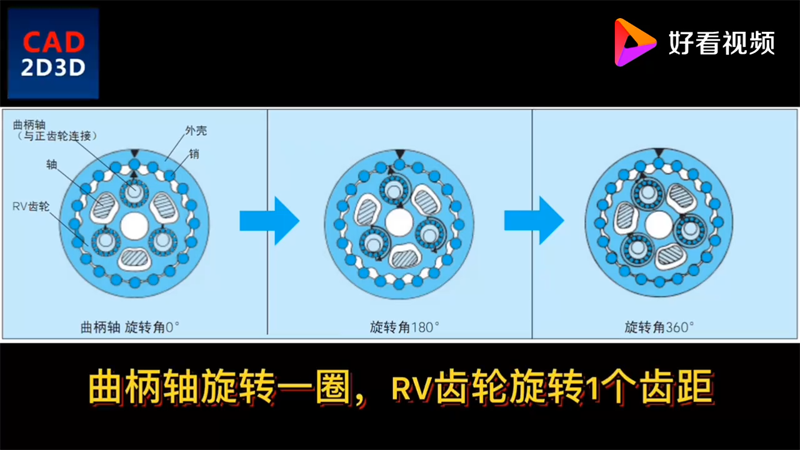
����݆�����Dͨ�^�����S�������180�ȵĔ[��݆���Ķ����ɔ[��݆�Ĺ��D��ͬ�r���ڔ[��݆�Ĺ��D�^���У��ܵ��̶�����X���ϵ���X�����������γ��c�[��݆�����ķ����෴�����أ�Ҳ����˔[��݆�����D�\�ӣ��@������˵ڶ����p�١�
�\�ӵ�ݔ��ͨ�^�ɂ������Sʹ�[��݆�c���ԱP����ƽ����߅�εĵȽ��ٶ�ݔ���C�������[��݆���D�ӵ��ق��f�o���ԱP��ݔ���P��
Rv�p�ٙC�����f�Ǹ߾��șC���˵��P�����x�_RV�p�����Ĵ��ڣ��C��������Ҫ�ֱ��x�������εā��fRv�p�ٙC����һ�N���õĂ����b�ã����������ͣ��ܺ�С���Y���o�������c��һ�_���I�C����������Ҫ4�_RV�p�ٙC���܉�����ʹ�ã�����RV�p�ٙC�ϵijɱ�ռ��ռ���˹��I�C���˳ɱ���40%�����@һ�I���ձ����Ǯ�֮�o�������^�ϴ��e�Dz��{��˹�������İѳ����P�ļ��g��ÿ�����������f�_��RV�p�ٙCռ����ȫ��60%���Ј�������30��ĕr�g�Ї��y��ͻ�ƣ��ձ��˱�{�������g������ؔ��һ��RV�p�ٙC�ձ��ø߳��ɱ��ăr���u�o�҂������҂�߀���ò��I����ʲô�أ�����҂��]�м��g�����]�м��g��Ҫ�������˾�Ҫ����ե�������҂�Ҫ�IJ��{��˹����؛���˼�߀���R�Ͻo�㣬�҂�߀�õ�3~6���µĕr�g��������Ի��؛�ڣ����@һ���S��һ���˵ij��F�صČ���



�����Ǐ��S�����ڣ�����4��Ċ^�����T�����҇�RV�p�������x�ͣ�RV�p������������Ҫ����10�����Փ�о��Լ����P�������漰���������Ҫ���[�����ձ��IJ��{��˹�ˣ��S���Ї��p�������Q�����ձ��ص�ɵ�ۣ��҂��Ї��������M��RV�p�����_ʼ���������a������ԭ֮�ݙM���Ј����F���҂���RV�p�����ѽ��c�ձ���˾չ�_���eλ�������ڲ��õČ���Ҳ����������쿨�ڃȵęC�����Ĵ�˾���ձ����@һ�I����Ҳ�o�������҇�������Ȥ�ĵط����ˣ��ձ���I���@����߀Ҫ�����҇����棬�҂�ُ�I�����Ė|���ˣ��ձ���I�ݱ�Ҫ�ܵ��O��Ӱ푣����ԱƵ�����ֻ�ܽ��r30%������������ۂ�Ҳ���I�~��
�Ї��ĮaƷ��������Խ��Խ���N��������҇����ձ���ôҲ�����뵽���@һ���ձ��@������·�����ϲ�g��ܛ��Ӳ�����Ƴ�����ĕr����������Ę���ɳ�Dz��ʹͨͨ�W���Ї��Ė|�����Ї������˾�͵͵�������Ї����ĕr���ց������Ї������Ї�����֮����nj��Ї����г�ޣ��������ڙC���I��߀���ڜp�����I��̎̎ᘌ��҇���һ���Ї����������P���g�����R�Ͻ��r���Ї�ʾ�ã����@���Ҳ��ɵ��뵽�F���ڇ���߀�����@ôһ�NȺ�w���Ǿ����ձ���һ���������������Ǻõģ��҂��Ї���һ���������������Dz��õģ��ձ��ĺͷ����ձ���Ӱҕ���������ձ������ձ���ʿ���������������Č����Ҳ�Փ�҇���ޣ����������ձ�����ô���ۂ��Ї��ļ��g�ˆ��ô��ե�Ї���I�Ć�r���ձ��ĺͷ����Ї����е���׃���ձ����҇���Ӱ�����Ǵ۸Ěvʷ�����Ļ��B�������c�����������ձ�������ú�������ô���Լ����ҵĿƹ����O��������O�����cؕ�I��������λ��һ������ֻ����������������҂��͏��ձ���Iᘌ��҇����@һ�c���҂���ԓ�����ԏ����Ų��࣬�аl�������҂��Լ��ļ��g��������A��Ů���҂��Ԯ� ȡ����ļ��������ҵ�δ��߀��Ҫ�҂�ȥ֧��.

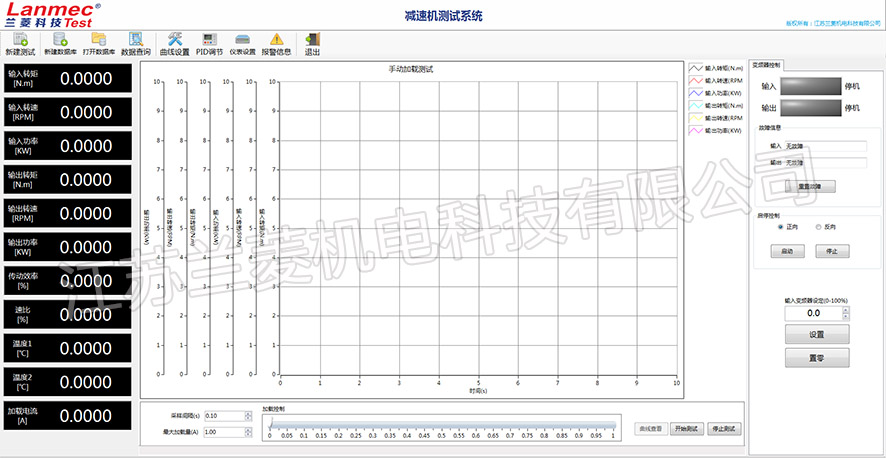
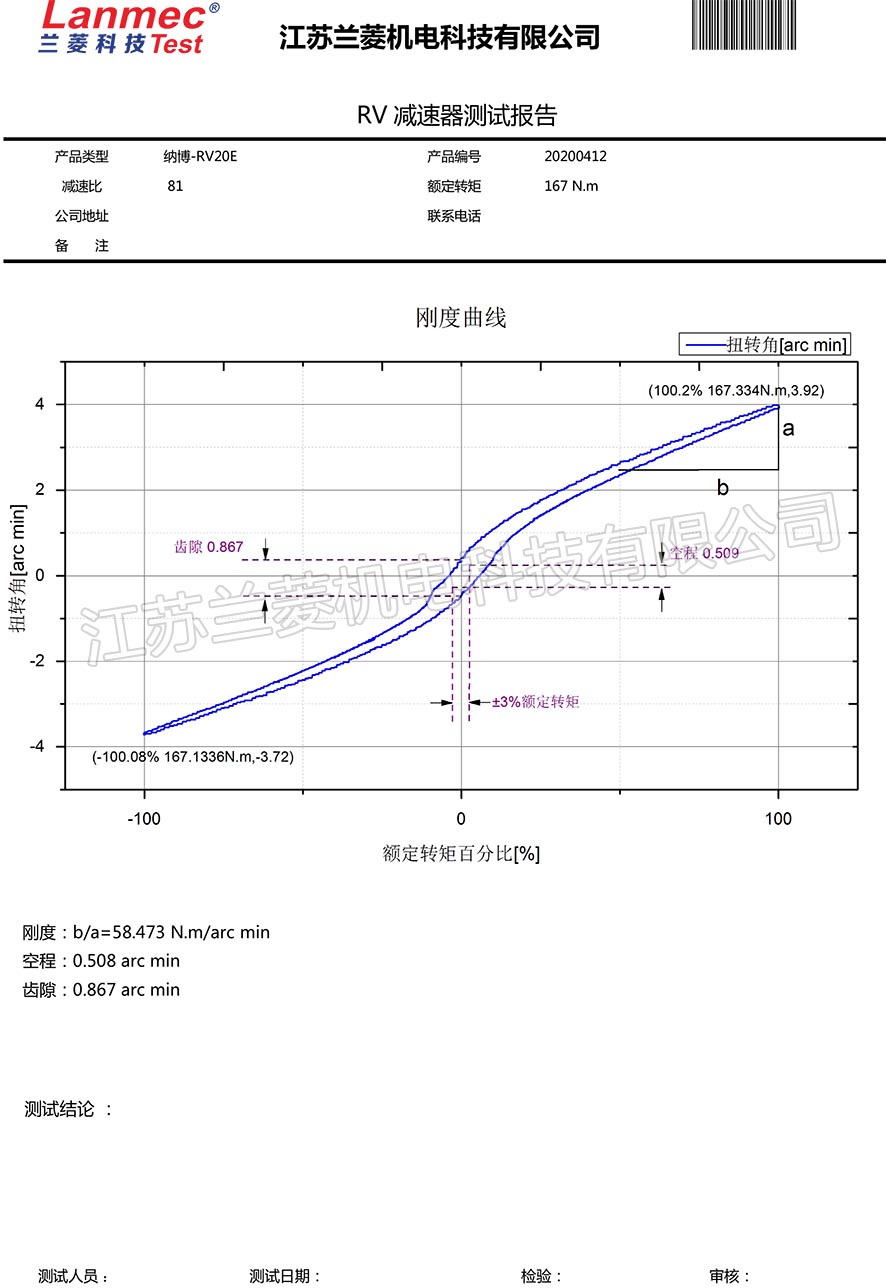
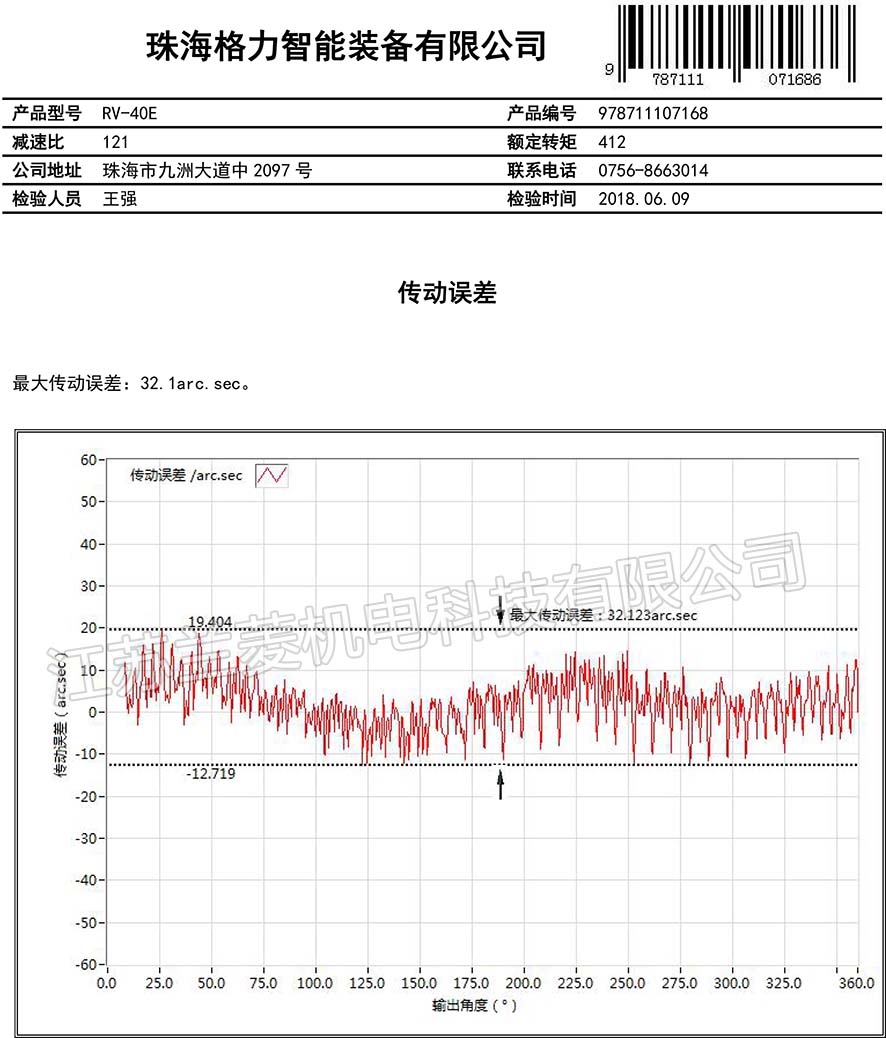
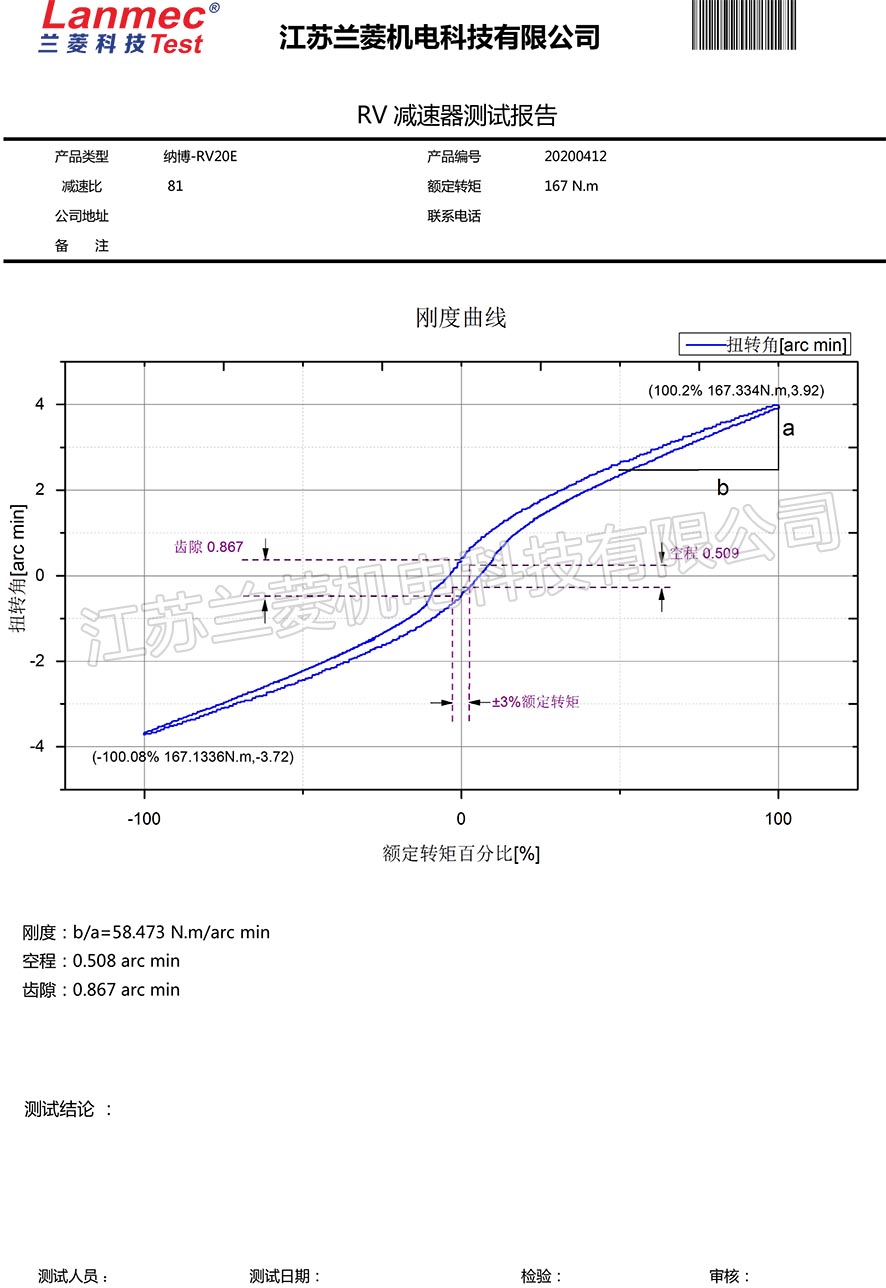
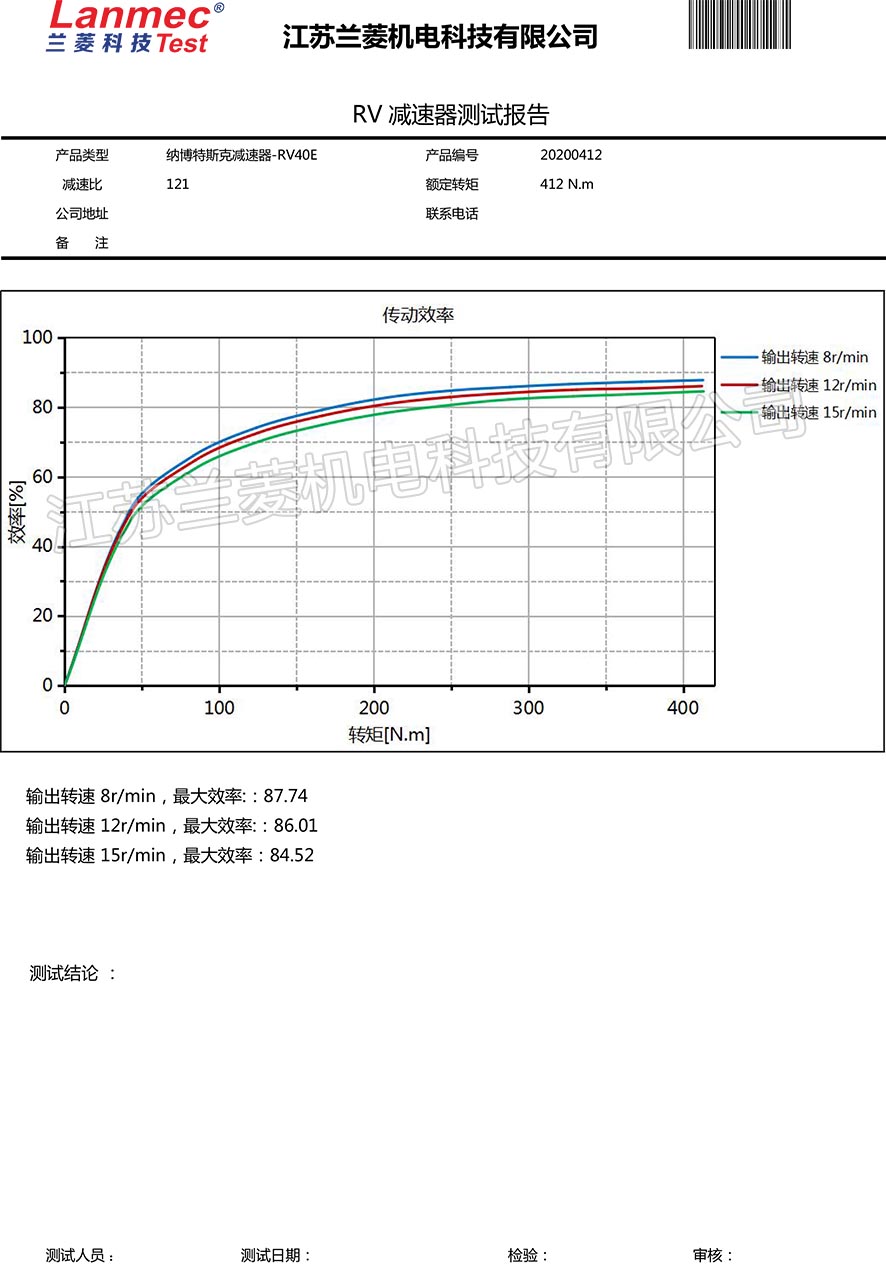
RV�p�ٙC�yԇ�_�ɜy�Ŀ
Ч�ʡ������`����ȡ���϶
�ճ̡�����Ť�ء����d��������
Ҏ����̖��
K2-RVZHCS-100 ( 100N. m)
K2-RVZHCS-200 (200N. m)
K2-RVZHCS-500 (500N. m)
K2-RVZHCS-1000 (1000N.m)
K2-RVZHCS-2000 (2000N. m)
K2-RVZHCS-5000 (5000N.m)
K2-RVZHCS-10000 (10000N.m)
늚�����:(���x)
�ŷ�ϵ�y:ABB���������R��
�ǶȾ��a��:���h������B
�D���D�ق�����: HBM��KSTER���m��Ƽ�
�ṩ������У�ʈ��(���x)
���ؙC:�_�����A610L/710/8G/1T/17/DvD
�ɼ���:����NI���_�����A
�\�ӿ�:�_�����A
�C���:
ֱ����܉:�_���y̩�����y
�L��z��:�_���y̩�����y
���bƽ�_:HT200,���λػ�ȥ����,��܉��ĥ
���o��:���ӌ������]ʽ
�Cе����:ͬ�Ķȡ�0.03mm
�y������:
�Ƕ�:��2����
�D��:��0.1%FS(������)ʿ0.2%FS(С����)
�D��:��0.1%FS
�ض�:��0.3��
�؏���:�ܡ�1%
ܛ������:�����@ʾ�D�ء��D�١����ʡ��ٱȡ��Ƕȡ���ӡ��ضȵȅ���������,���Դ�ӡ���,�惦����,�l�a������(�ɽ��ܶ���)
���K�m��C늿Ƽ�����˾λ�ڽ��Kʡ��ͨ�к�����,�LJ��Ҹ��¼��g��I,ʡ���аl����,�Ї�Ӌ����W������λ,���K��W�о�����Ӗ���ء�
���K�m��C늿Ƽ�����˾���I���a�D���D�ق��������p�ٙC��늙C�yԇƽ�_,�����Լ����D���D�ق������z�y����,�OӋ����,���ܼӹ�܇�g,�ͽ���S�����b�估�{ԇ�ˆT��
RV�p�ٙC�yԇ�_����ʹ�ÿ͑���:�麣�������㽭�p�h�����վ�¡���V�ݺ��������T���������M��ʏ��ِ�������ϴ�W���A����������h���������K���͵ȵȡ�
�ŷ�늙C��ʲô���@ô���_��
�ŷ�늙C�Ͳ��M늙Cһ�ӣ������\���}�_���M�ж�λ��ÿ���յ�һ���}�_�t���Dһ���̶��ĽǶȣ��ŷ�늙C�ľ��_��Ҫȡ�Q������˵����D���a��������17λ���a���ģ��ŷ�늙C���յ�һ���}�_���H�H���Ƅ�0.0027�ȡ����յ�131,072���}�_��̖�������DһȦ�������ŷ�늙C�ľ���������늙C�o���ȔM�ģ����Λr�ŷ�늙C�����dz����_�ķ���ϵ�y���Á���ֹ�}�_��̖���e�`���@�����Ԅӻ������δ����
RV�p�ٙC��һ�N�������_�C���������X݆���ٶ��D�Q�������R�_�Ļ��D���p�ٵ���Ҫ�Ļ��D�������õ��^���D�صęC������ԭ�әC�����C֮�g�Ī������]ʽ�����b�ã��Á������D�ٺ������D�أ��ԝM�㹤����Ҫ����ijЩ����Ҳ�Á����٣��Q����������RV�p�ٙC��ԭ�әC�����C����ЙC��֮�g��ƥ���D�ٺ͂��f�D�ص����ã��p�ٙC��һ�N�������ܵęCе��ʹ������Ŀ���ǽ����D�٣������D�ء����Ղ��Ӽ�����ͬ�ɷ֞�μ��Ͷ༉�p�ٙC�������X�S݆�Π�ɷ֞�A���X݆�p�ٙC���A�F�X݆�p�ٙC�͈A�F���A���X��݆�p�ٙC�����Ղ��ӵIJ�����ʽ�ֿɷ֞�չ�_ʽ������ʽ��ͬ�M�Sʽ�p�ٙC��
���aRV�p�������컨��,RV�p�ٙC�ǹ��I�C�����I����[�ι��̣��e������ò���P����ÿһ���X��ÿһ����λ���ИO�����ľ���Ҫ�����������@�N�߾���Ҫ���@һ�I������ӽ�30�ꡣ
ȫ��C���˜p�����Ј�һֱ�ʬF�߶ȼ��Р�B��ȫ���緶���ȵĹ��I�C���ˣ�80%���P���p�ٙC���Dz����ձ���RV�p�ٙC�����@80%�Ĺ�˾�����ֳ��^��80%��ȫ�����õ�ͬһ�ҵ��ձ��Ĝp�ٙC�������H�Ŕ����Ї���Ҳ�Ŕ���ȫ���硣
�挦������������a��I��ԓ����ƾ֣�
����h���A�p�ٙC����˾�Ă}���һ��ֱ��1.1��1.3�ĺڴ�����ͨ늜yԇ�\�У����b��һ���L�_11�ęCе���ϣ��ں˾�׃��������S�o����̫��ܵ��\�У���������h���A�аl��������_45�fţ�ה[���X݆�p�ٙC��ʽ�����o�Ї��ƌWԺ�Ϸ����|�о�Ժ���������ڇ��H��˾�׃�����b���У��@�_RV�p�ٙC�OӋ��;�LJ��H��˾�׃�������ܙCе�۵��P������Ŀǰ���������_�O�߾��ȴ�p�ٱȺͳ���Ť��һ�w������d��RV�p�ٙC����־���҇���RV�p�ٙC�I��ȡ�����ش�ͻ�ơ�
��h���Aλ���S��^��Ҟ��֣������_ʼ�������p�ٙC�aƷ���{������Vɽ�����������_��Cе�O�乩����ͨ�p�ٙC��һ�������L���ИI���^����2012������h���A�_ʼ�аlRV�p�ٙC�����^������L���P��2014��ɹ��аl����������֪�R�a���RV�p�ٙC�����^��10������^��ɣ���h���A�аl��RV�p�ٙC�Ѱlչ��6��ϵ�о�̎�ڇ��H���ȡ�
��˾2017�����Ƴ���������֪��С��RV���p�ٙC���H��0.37������d������45ţ�D�ף��\�о��ȿ��_һ���^�l�z��1/20�������ڸ߶��t���C�������ϣ���ǰȫ�����Ĕ[���X݆�p�ٙC�d������25�����@�_���d�������_45����ˢ��������o䛡���˾���DZ����u����Ҽ���������С������I��RV�p�ٙC�ǹ��I�C���˵ĺ��IJ������ஔ�����w�ļ硢�⡢ϥ����Ҫ�����;��_�\�D���Pϵ������ļ��g�^ȥһֱ�����⡣�������o80����ɹ����a����1�_�u݆�p�ٙC�_ʼ����h���A�����ИI���30���꣬2011����h���A�_ʼ�аl��RV���p�ٙC��˾��ʼ�����\�厧�I��˾10��λ���g�ˆT����RV�p�ٙC����U��ԇ�Ʒ�_���f�����b������һ��܇���ڈԳֲ�и��Ŭ����2014�깫˾�ɹ������аl��RV�p�ٙC����ʡ�Ƽ��d�b�������w���g�_�����H���Mˮƽ��
2015��3��RV�p������ʽ���a��Ͷ���Ј������p�ٙC�����ڴ��F�����v�͕r�g��Ҫ�Aע�ڮaƷ��ǧ�N�ٟ��͵������£����aRV�p�ٙC���������ף��lҲ�]���뵽���ć��aRV�p�ٙC��Ѹ���_�����Hˮƽ��������h���A�ij�Ҏ���I�C����RV�p�ٙC�aƷ���F�c���Hˮƽ���ã������аl�Ĵ���RV�p�ٙC�aƷ���F�I����
���鹤�I�C���˰lչ���P�I�㲿�����ǙC���ˮa�I朇��a�����y�еĹ��^��������S���C�����ИI����Ȼ֏��ИI����Ȼ֏ͣ����Ȝp�ٙC��I���ඨ�cͻ�ƣ�RV�p�ٙC���a����̎�ڼ���������B�����I�C������RV�p�ٙC������������ӿ����쏊�����O�������Ƅӹ��I�C���ˮa�I�lչ���҇����������P���T���_��һϵ�����ߣ��Ą�I�C���ˮa�I�lչ�������ܙC���˼��g�lչ�I��ʮ����Ҏ���VҪ���Ҫͻ�����M���������߾��ȷ���ϵ�y�������ܜp���������ܙC�����P�I���g��
��ʩ���������2025��Ҫ��������I�C���ˣ��ܶ�ͻ��100�N���ϙC���˄����ü��g����Q�������ƏV200�����Ͼ����^���gˮƽ��������ģʽ���@�����ó�Ч�ęC���˵��͑��È������ڇ��a�C���ˮa�I���ٰlչ��ͬ�r���c֮�����Ĝp�ٙC�ИI��Խ��Խ�Ѵ�Ŀǰ�p�ٙC�aƷ���_�ϰٷN���V�����������������b�����̙Cе��ұ��ˮ��������t�����Cе���ИI�����a�������I�C����δ��ǰ���C���ˮa�I�İlչ�ض��������a�I����
fͬ�İlչ������ęC���ˮaƷ����и�Ʒ�|�������������㲿���aƷ֧�Σ����㲿���aƷ�ij��L��������C���Þ���A�����܌��F���е��µ��|׃��
|

