���I(y��)�C�������@����l(f��)չԽ��ԽѸ�ͣ��S���ИI(y��)�������˙C���ˣ��ڙCе�b�����ˮ������Һ���C���Ʒ�ĩ���^���У��b��ȡ�����ڶ����؏�(f��)�������dz��m�ϙCе�ˁ�������һ�ǽ����˳ɱ����������������ܾ��_�����˲���Ч�ʸ߶��ˡ�
Ȼ���ڙC���˵ĺ����I(l��ng)�����P(gu��n)��(ji��)̎���D(zhu��n)�Ӻ͂����b�ã��C���p�ٙC�������ʹ�õľ��Ⱥ��ٶ� ���҇�ʼ�K�]�����պ��ļ��g(sh��)�������ڽ����ؑc��W(xu��)��������ڵĈFꠡ�ȡ�����ش�Ŀ��гɹ�����˾���C���p�ٙC�O(sh��)Ӌ�����u�r�yԇ�wϵ�Ĺ����P(gu��n)�I���g(sh��)���ɹ����Ƴ���Ч�ɿ��C���p�ٙC����Ҫ��ָ�C�����������τ����r���ɾo�m�ȣ��ʴ_���־������ͱ����f��סһ���u����һ���õ÷�(w��n)�����Dz������������p���p�ţ��w�F(xi��n)�ˮ������I(y��)�ĸ߳�ˮƽ��
������֪���I(y��)�C������Ҫ�Мp�ٙC���ŷ�늙C������ϵ�y(t��ng)������IJ�λ�M�ɡ��p�ٙC���鹤�I(y��)�C���˵���Ҫ�������ŷ��(q��)��늙C�c���y(t��ng)늙C���^��(ji��)��Ч���@��������(j��)�ӹ���ˇ�����a(ch��n)��(ji��)�IJ�ͬ���ŷ��(q��)��늙C�ɹ�(ji��)� 20%-60%���������Cе�Y(ji��)��(g��u)��ռ��(j��)����Ҫ�ĵ�λ���ɱ��ӽ�1/3�������҇����C���p�ٙC�����L���ԁ�һֱ��ه�M�ڣ�Ҳ�Ƽs���҇����I(y��)�C���ˮa(ch��n)�I(y��)���Mһ���l(f��)չ�� �p�ٙC�ñ��˵��ֱ۵��P(gu��n)��(ji��)�������C���ֱ۵ķ�����Ƕȣ����������ȵȣ����C������Ҫ�ߏ��ȵ��؏�(f��)�������@���P(gu��n)��(ji��)�ĺÉěQ���˹��I(y��)�C���˵Ĺ���Ч���Լ�������Ч���������P(gu��n)��Ҫ��������F��Ⱥ�ͻ�����X���O(sh��)Ӌ�����ϼӹ����g(sh��)���u�y�u�r�ȶ����P(gu��n)�I�Լ��g(sh��)�K�ڴ�����@���Ŕ��Լ��g(sh��)���ɹ����Ƴ������a(ch��n)�ľ����C���p�ٙC��Ŀǰ�Ŀͨ�^�ˮa(ch��n)�W(xu��)�к�����������a(ch��n)3�f�_���������a(ch��n)�����@a(ch��n)Ʒ���F(xi��n)�˹��I(y��)�C���˺��ļ��g(sh��)�����ć��a(ch��n)�����҇����I(y��)�C����δ�����ڡ�
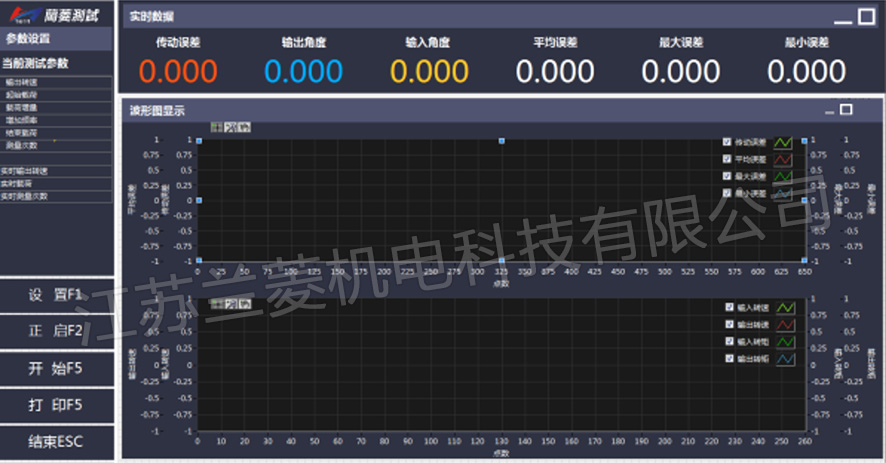

�@���C���p�ٙC�yԇܛ���Ĺ������棬�@ʾ�Ю�ǰ�yԇ����(sh��)�������`�ݔ���Ƕȡ�ݔ��Ƕȡ�ƽ���`�����`���С�`�ݔ���D(zhu��n)�� , ���Ч�ʡ�
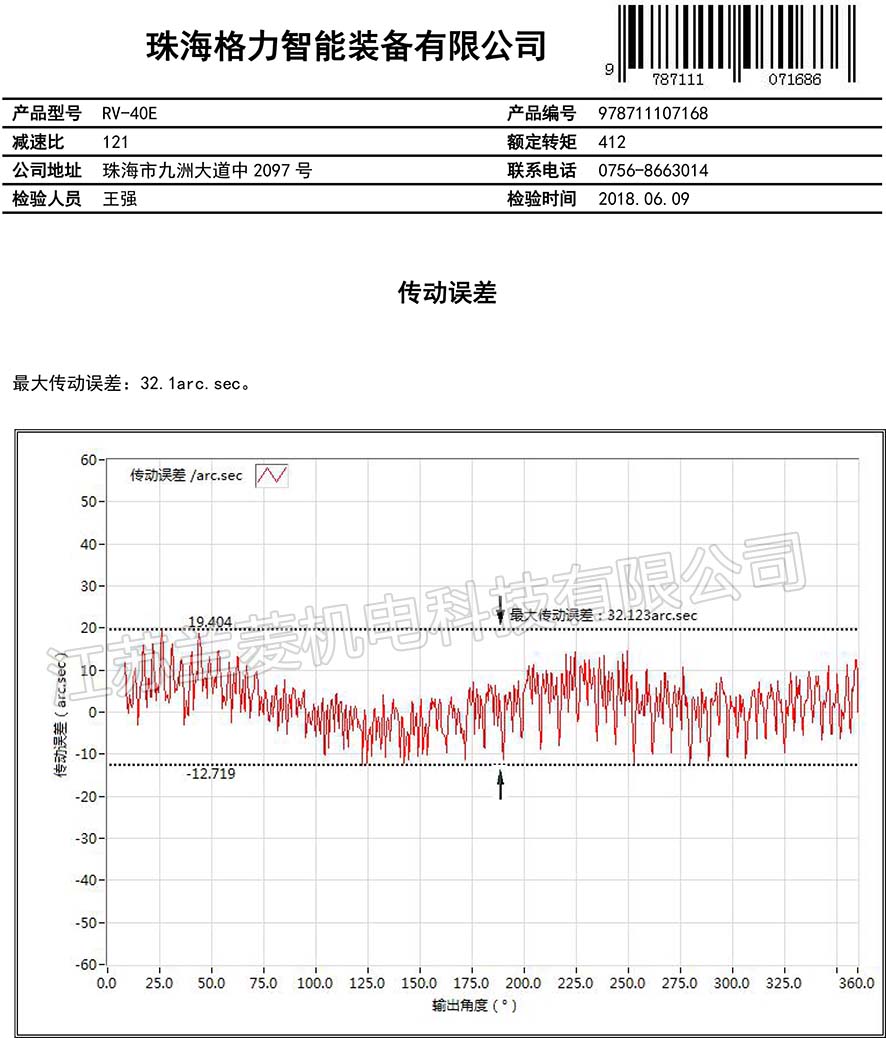
�yԇ�@ʾ���麣���������b������˾���yԇ��RV-40E���a(ch��n)Ʒ��̖��978711107168 �p�ٱ��_��121���~���D(zhu��n)��412���yԇ��ַ���麣�о����2097̖��(li��n)ϵ�Ԓ��0756-8663014 �z��ˆT���������z�r�g��2018��6��9�ա�
�����`��������`�� 32.1arc.sec.ݔ���Ƕȏ�25-325�ȡ�
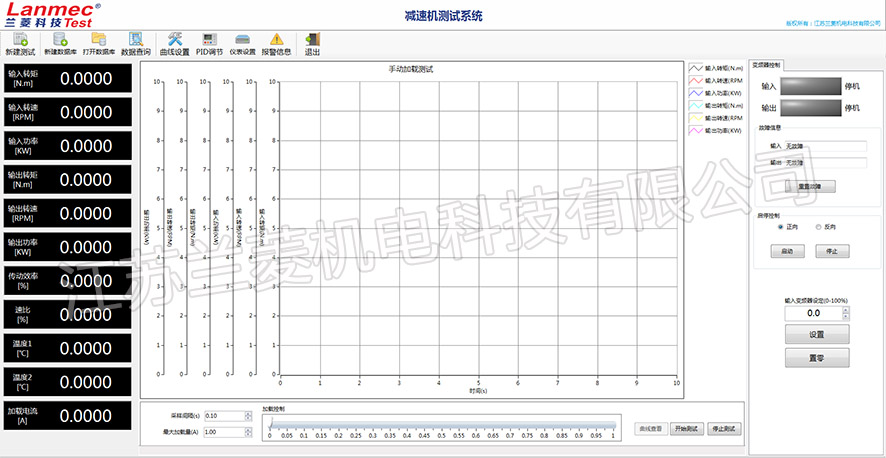
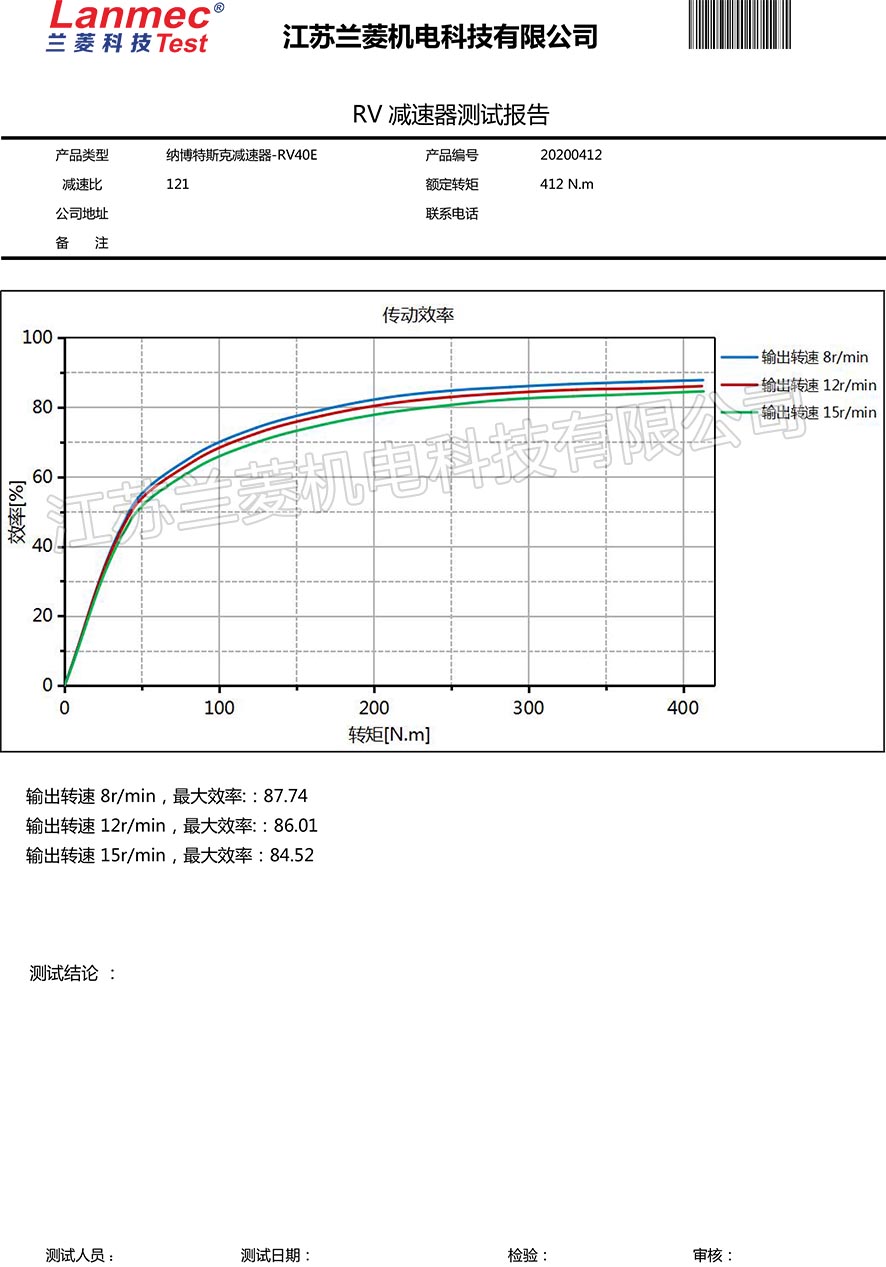
RV�p�ٙC�yԇ����@ʾ��
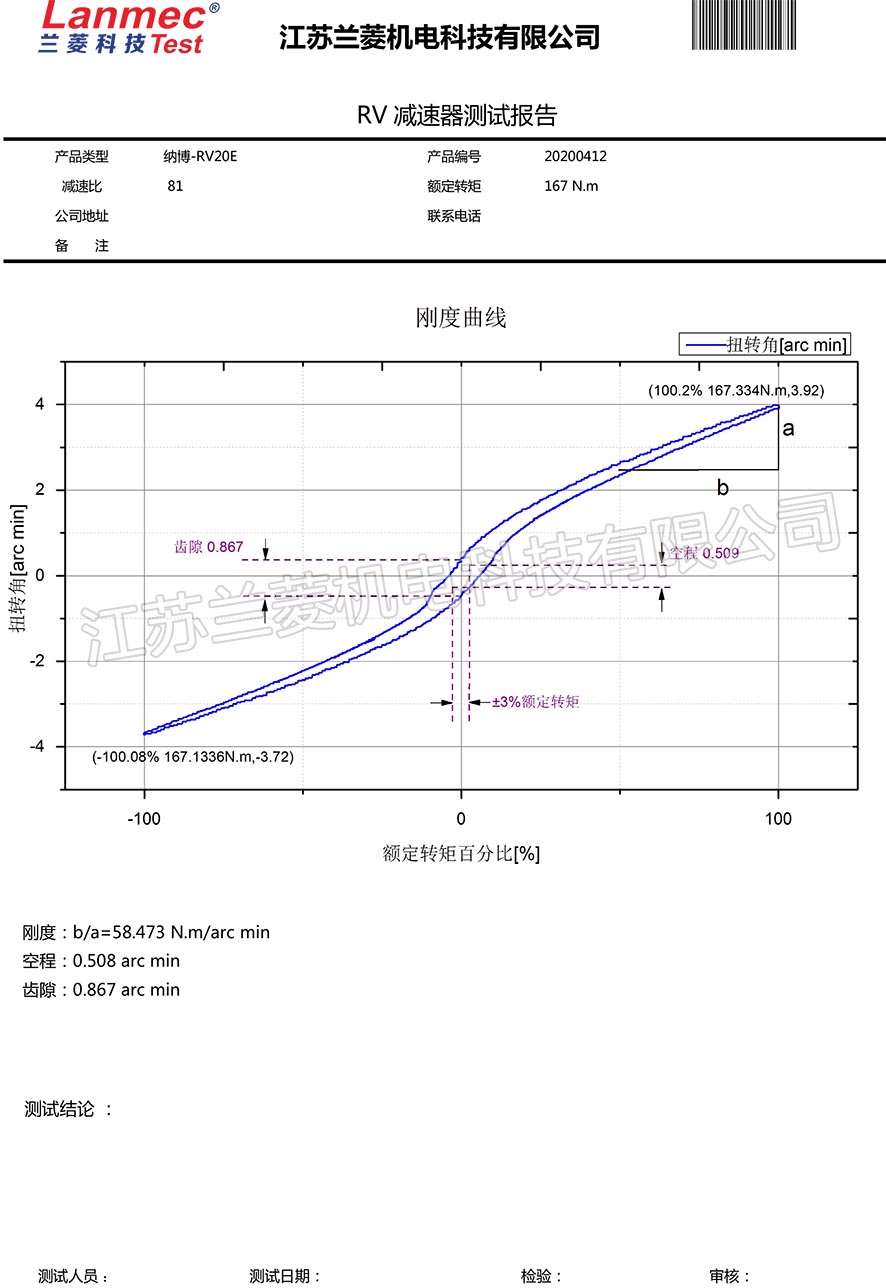
�{��-RV20E �a(ch��n)Ʒ��̖��20200412 �p�ٱȣ�81 �~���D(zhu��n)�أ�167N.m �������� Ť�D(zhu��n)��arc min
���ȣ�b/a=58.473 N.m/arc min
�ճ̣�0.508 arc min
�X϶��0.867 arc min
���ܣ��@ʾ���RV&�C���p�ٙC�Č��r���ȡ����ȡ�ݔ���D(zhu��n)�١������`�Ч�ʵĔ�(sh��)��(j��)�����Ρ�����������������豣��ʹ�ӡ��
RV���������C���p�ٙC�yԇܛ���@ʾ��
ݔ���D(zhu��n)��8r/min , ���Ч�ʣ�87.74
ݔ���D(zhu��n)��12r/min , ���Ч�ʣ�86.01
ݔ���D(zhu��n)��15r/min , ���Ч�ʣ�84.52
�����`�ݔ���Ƕȣ�ݔ��Ƕȣ�ƽ���`�����`���С�`��
����ͨ�^���ΈD�@ʾ��Ҳ��ͨ�^���r��(sh��)��(j��)�@ʾ��
��ͨ�^���O(sh��)��F1������F2���_ʼF5����ӡF5���Y(ji��)��ESC��ͨ�^��X�I�P���ƺͿ��Դ�ӡ��棬���Ϝyԇ�ˆT���yԇ�r�g���z��Ŀ���I(l��ng)��(d��o)���ˡ������f���뷨��ȫ����(sh��)��(j��)Ԕ�M��
��ӡ�Ĉ����x�ԏ����������x����ȥ���I(y��)���ɿ�����һ������y����(sh��)��(j��)������(j��)���m�˾ע�ؼ��g(sh��)���_ʼ�c������ע�ؿ͑��ķ������������Ƽ��g(sh��)�������c�������Һ�У���ں������ü��g(sh��)�c�ۺ��A�ÿ͑���
�C���p���C��ԭ������(y��ng)��
һ���C���p���C����
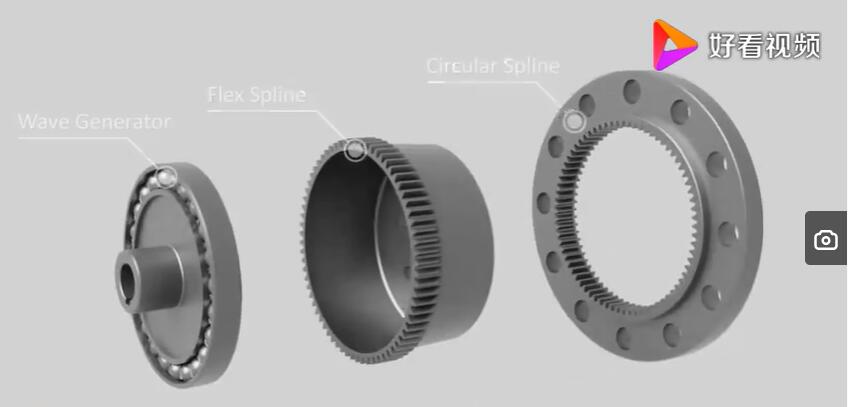
�C���X݆�p���C�����������X݆����ԭ���l(f��)չ������һ�N���͜p���C���C���X݆���ӣ����Q�C�����ӣ�������������������a(ch��n)�����ԙCе������f�������\�ӵ�һ�N�����X݆���ӡ�
��������ԭ��
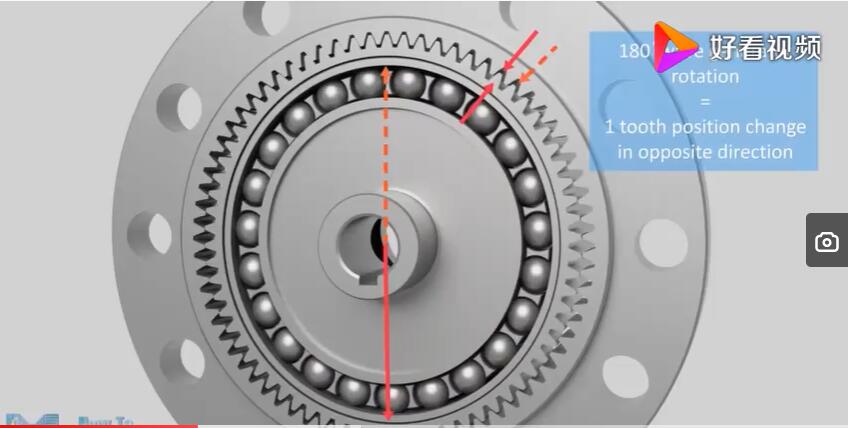
�����l(f��)���������ӕr��݆����݆��(n��i)�D(zhu��n)�ӣ��ͽ�ʹ��݆�������S�аl(f��)��׃�οɿصď���׃�Σ����@�r��݆���X����׃�ε��^�����M�루���ϣ����˳������x����݆���X�g���ڲ��l(f��)�������L�S̎̎����ȫ���ϣ������S������X��̎����ȫ��Ó�_�����l(f��)����ͨ���əE�A�ε�݆����݆�b�뱡���S�Ѓ�(n��i)���ٌ������b����݆��(n��i)���˕r��݆��ԭ���ĈA�ζ�׃�əE�A�Σ��E�A�L�S�ɶ˵���݆�c֮��ϵĄ�݆�X�t̎����ȫ���Ϡ�B(t��i)������݆�����X�c��݆�ă�(n��i)�X���X�߇��ϡ��@�LJ��υ^(q��)��һ����30%���ҵ��X̎�ڇ��Ϡ�B(t��i)���E�A���S�ɶ˵���݆�X�c��݆�X̎����ȫÓ�_��B(t��i)�����QÓ�_���ڲ��l(f��)�����L�S�Ͷ��S֮�g����݆�X������݆���L�IJ�ͬ�^(q��)��(n��i)���е���u�˳���݆�X�g��̎�ڰ�Ó�_��B(t��i)���Q֮�釧����
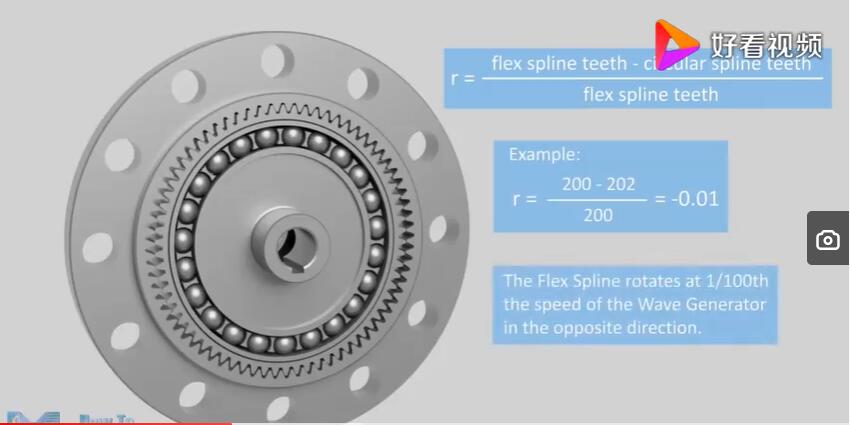
���l(f��)��������݆��(n��i)�D(zhu��n)�ӕr����ʹ��݆�a(ch��n)���B�m(x��)�ď���׃�Σ��˕r���l(f��)�������B�m(x��)�D(zhu��n)�ӣ���ʹ��݆�X�ć��롪���ϡ�������Ó�_�@�ķN��B(t��i)ѭ�h(hu��n)����(f��)����ظ�׃����ԭ���ć��Ϡ�B(t��i)���@�N�F(xi��n)��Q֮�e�X�\�ӣ������@һ�e�X�\�ӣ�����p�����ͿɌ�ݔ��ĸ����D(zhu��n)��׃?y��u)�ݔ���ĵ����D(zhu��n)�ӡ������p���l(f��)�������C���X݆���ӣ������l(f��)����형r��D(zhu��n)��1/8�ܕr����݆�X�c��݆�X����ԭ���ć����B(t��i)���ɇ��Ϡ�B(t��i)����ԭ��Ó�_��B(t��i)�ͳɞ釧���B(t��i)��ͬ�ӵ���������׃?y��u)�Ó�_������׃?y��u)釧�����@����݆������݆�D(zhu��n)�ӣ���λ�ƣ���1/4�X��ͬ�������l(f��)�������D(zhu��n)��1/8�ܕr���؏�(f��)�����^�̣��@�r��݆λ��һ���X�ࡣ������ƣ����l(f��)����������݆�D(zhu��n)��һ�ܕr����݆������݆��λ�ƞ�ɂ��X�ࡣ��݆�X�̈́�݆�X�ڹ�(ji��)�A̎�����^�̾���ͬ�ɂ����L�ӟo���ӣ��ĈA�h(hu��n)һ�ӣ��������κ�˲�g���ڹ�(ji��)�A���D(zhu��n)�^�Ļ��L�����ȡ�������݆�Ȅ�݆�ڹ�(ji��)�A���L�����˃ɂ��X�࣬������݆�ڇ����^���У��ͱ��������݆�D(zhu��n)�^�ɂ��X��Ľ�λ�ƣ��@����λ�����ǜp����ݔ���S���D(zhu��n)�ӣ��Ķ����F(xi��n)�˜p�ٵ�Ŀ�ġ�
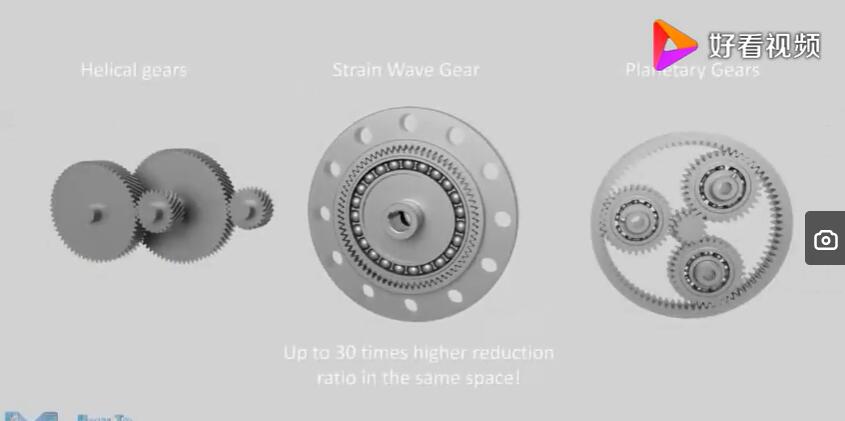
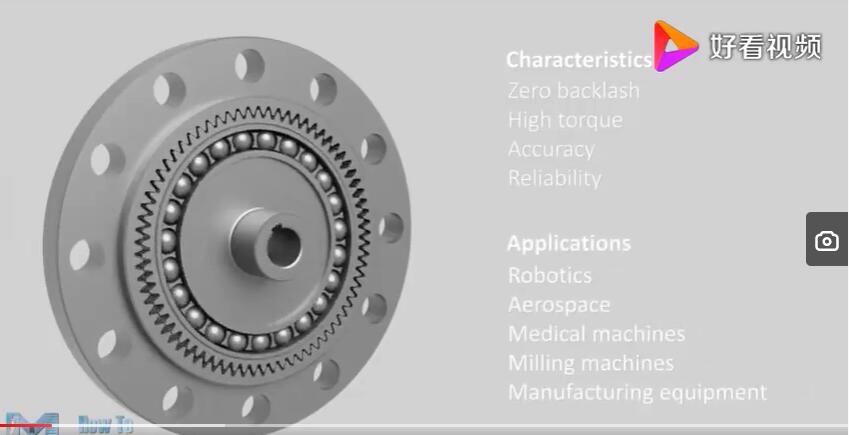
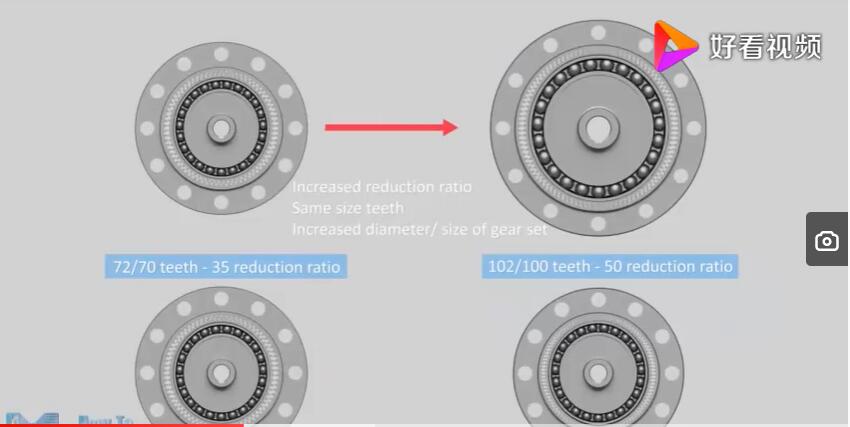
�C���p�ٙC��һ�N���͵ęCе����׃�ٙC��(g��u)���c��ͨ�X݆������Ⱦ����w�eС�������p���Y(ji��)��(g��u)���Σ����ӱȷ������μ����ӱȞ�40~350���༉���ӱȿ��_��1600-100000��������Ч�ʸߣ����μ�����Ч��N���ڵ���85%�������Ӿ��ȸߣ����d�����������c���ɏV�����ں��졢���ա����I(y��)�C���ˡ��C�����M�o��ͨӍ�O(sh��)�䣬�����Cе�����w�Cе���켈�Cе���l(f��)�әC��(g��u)��ӡˢ�Cе��ʳƷ�Cе���t(y��)����е���I(l��ng)��



�C���(q��)������ԭ����
�C���(q��)������������������(g��u)�ɣ����l(f��)������E�A�Σ���݆�鱡�ڱ���Ľ��ُ����w�����(c��)�ӹ����X݆���݆����ԭh(hu��n)���(n��i)��(c��)�ӹ����X݆������݆����(j��)���l(f��)�����M�Џ���׃�Σ�����׃�κ����݆�����L�S����ҧ�ϵ��݆�����l(f��)����형r����D(zhu��n)һȦ�ć��ϲ������θ�׃�����g�c��݆֮�g���ɂ��X����r��Ƅӡ�һ�㌢ԓ�����Q��ݔ����(zh��)�С�
�ձ�������I(y��)��ȫ������fһֱ���I(l��ng)�ȵģ��ձ����Ծ��������ɊZ�칤��������������ע���چ�һ�a(ch��n)Ʒ�������O������ҏV����x���Ԅ��i�o��ĸ���ձ���˾�����Ī������¡���ô�����҂��������ձ���������C���p�������C���p�������С��һ�����ֱ����һ�����ң�С��ֱ��ֻ�Ѓ����ף�ֻ���҂���(j��ng)��ʹ�õ�Ӳ����ô��
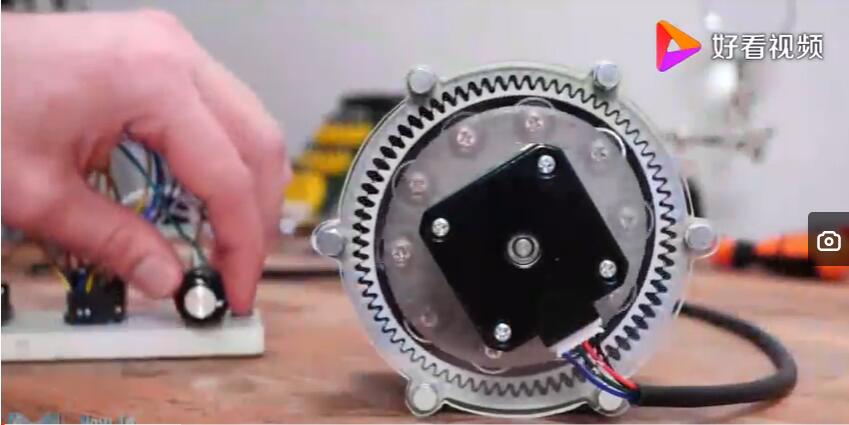
������ţ�˰�һ����С���C���p������ֱ��ֻ��5���ֵ��C���p�����Á���ԇ���ձ���������C���p�ٙC�����҂��Ȱ������b��һ�K�F�����档

�����C���p������һ�˰��bһ�����֣���30�����L���ڰ��ֵ�픶��b��һ���y���L�������y�������Ծ��_�@ʾ�����c���b�F���λ�ã��҂��ѳ�ʼλ���O(sh��)�ó�0��Ҳ���������y����픶��c�F��֮�g�Ǜ]��һ�z�Ŀp϶�ģ��҂��ٰ��C���p�ٙCͨ��늣��C���p�ٙC��ѭ�h(hu��n)������ÿ�����D(zhu��n)֮�������y�������@ʾ�Ĕ�(sh��)�ֶ���0����Ҋ�C���p�ٙC�ڽ�(j��ng)�^������D(zhu��n)�Ժ�λ�Û]�нz����׃������Ҋ�侫���Ƿdz��ߵġ�


��ʲô���I(y��)�C����ͨ����Ҫ�õ��p�ٙC�����I(y��)�C����ͨ����(zh��)���؏�(f��)�Ą����������ͬ�Ĺ���
���I(y��)�C���������a(ch��n)�У��҂�������˽�һ���C���p�ٙC��ʲô���c���Լ�����ͨ�^ʲôԭ��팍�F(xi��n)�p�ٵġ�
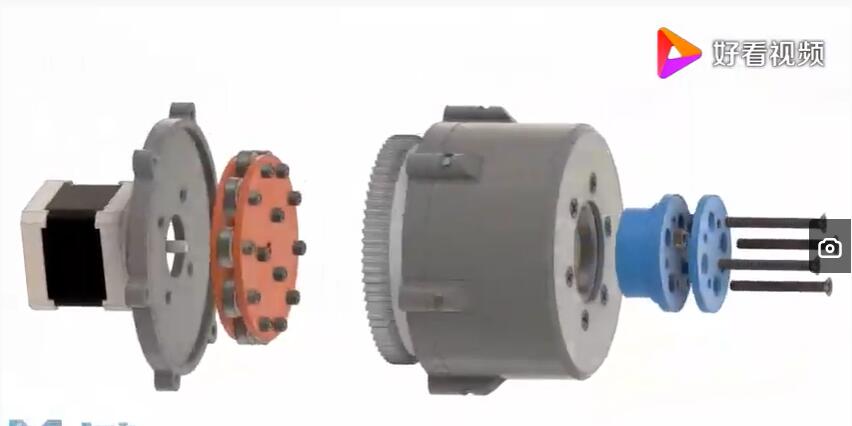
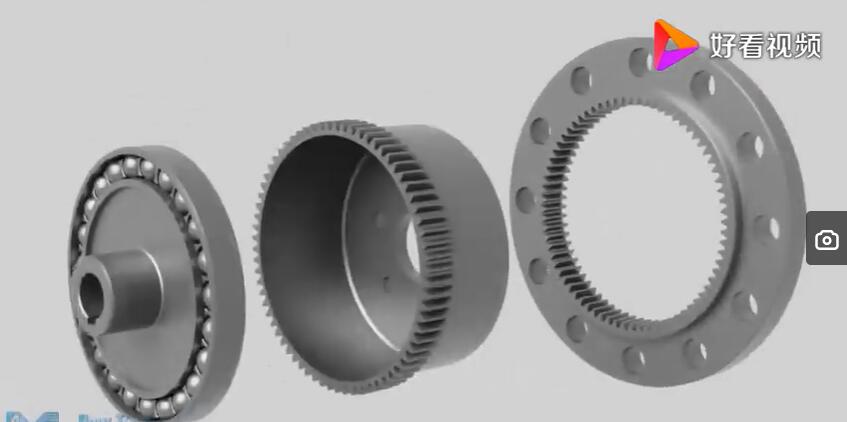
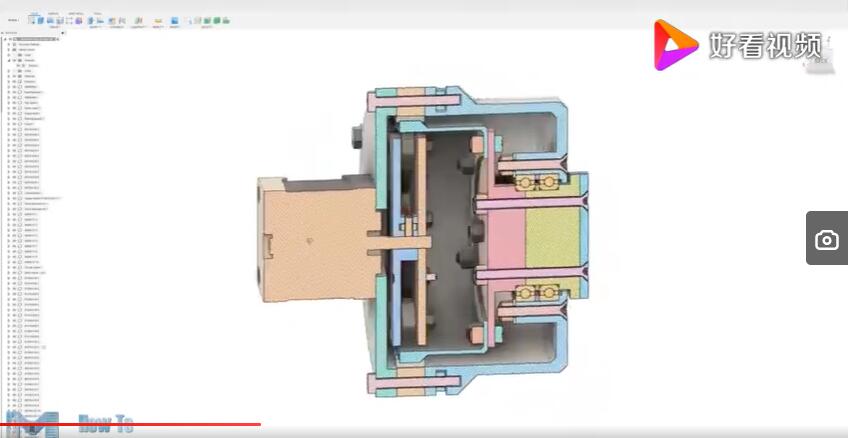
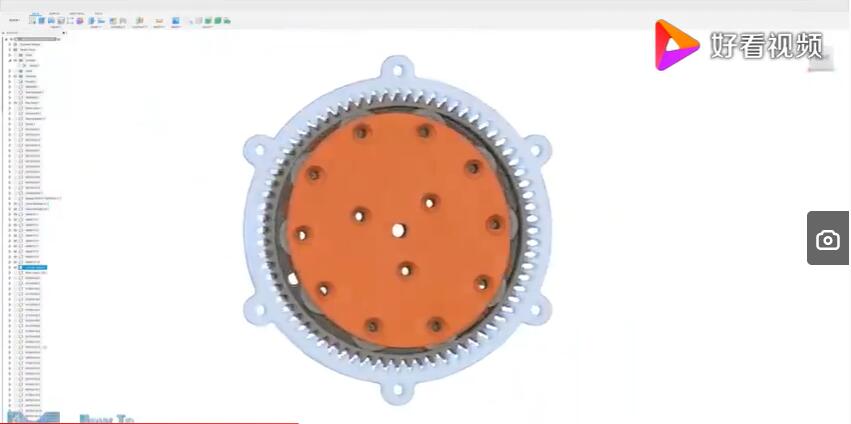
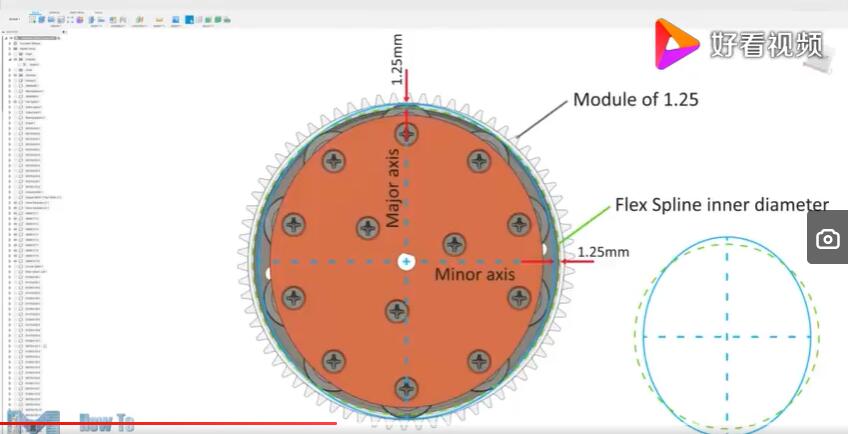
��ô�҂����ȁ���һ���C���p�ٙC���Ďײ��ֽM�ɣ��҂������@���DƬ����һ���C���p�ٙC�Č���D�������������ֽM�ɣ�ǰ���@�����S��һ�ӵĽ�������݆�����g���@������݆����߅���@���Ȧ���݆������Ҫ�������@�������ֽM�ɡ�
��ô�C���p�ٙC����ʲô���c�أ�
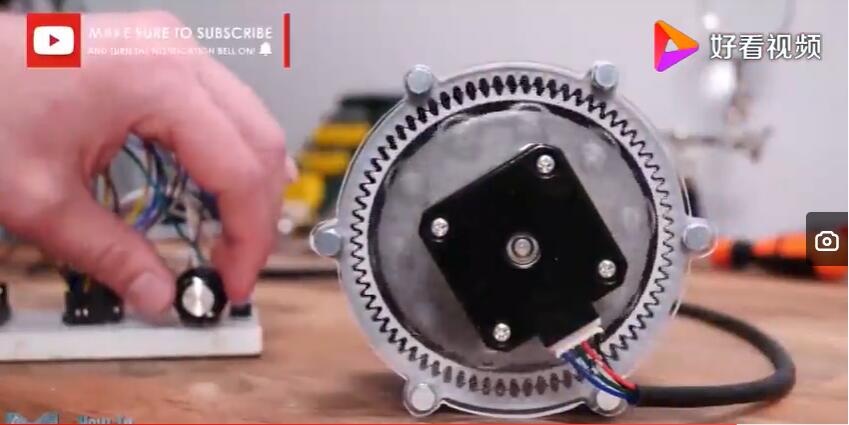
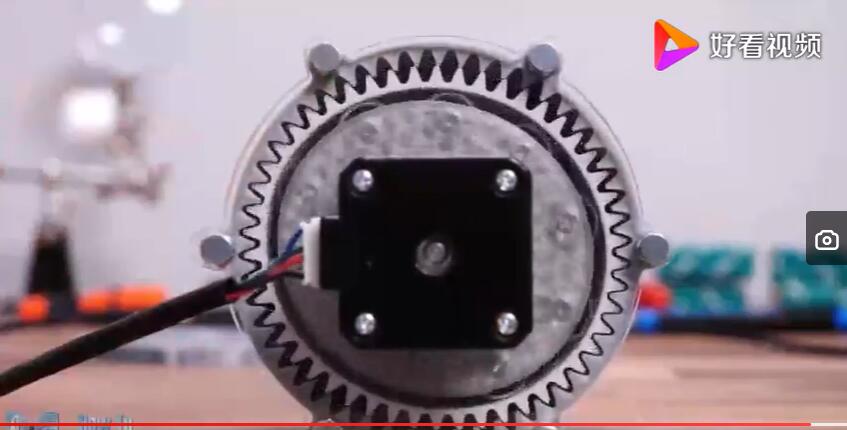
��������횴����ŷ�늙Cʹ�á���ʲô�أ�����������ľ���Ҫ��dz��ߣ���Ҷ�֪���ŷ�늙C���ȷdz��ߣ������f�����еĜp�������棬�C���p�ٙC�Ǿ�����ߵ�һ������ô�҂�һ���ŷ�늙C��(j��ng)�����õ��C���ˣ����͙C���˵ĸ��������D(zhu��n)���C���˵��P(gu��n)��(ji��)̎��������һ�����c���Ǿ��ȷdz��ߡ��������ijɱ�Ҳ�ܸߡ���ô�҂��ٿ����gһ����݆���@����ܛ�IJ��|(zh��)���^��ܛ�������f�����͛_���������^������(j��ng)���ܵ����������ě_��������ʹ�É���������Ӱ푡���Ȼ��ָ�����ڽ��ٵĸ�����f��
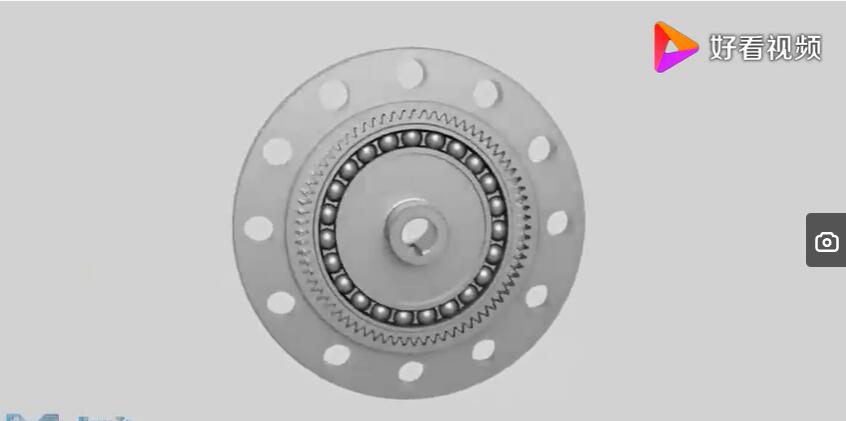
���҂����Y(ji��)һ���C���p�ٙC����ȱ�c���dzɱ��ߣ��͛_���������^������Ȼ�F(xi��n)�ڹ��I(y��)���^�l(f��)�_���������졢��ˮ�����õ��C���ˣ��õ��C���p�ٙC�ĵط����^�ࡣĿǰ���H��Ʒ�ƺ͇���(n��i)��Ʒ��Ҳ���١���ô�҂���һ��������ͨ�^ʲôԭ��팍ʩ�p�ٵ��@��Ч���ģ�ͨ�^�@��ҕ�l�҂��Ϳ��Կ������ⲿ������݆�������g����݆�����D(zhu��n)�\�ӣ��@������ֱ݆�Ӳ������g������݆���҂����Կ����@����݆��׃�εģ�����݆������݆һ�����D(zhu��n)�������݆׃�����c�܇����Ȧ�γ��ˇ��ϡ������@�����g������݆�����D(zhu��n)�������Mһ���_��һ���p��Ч�����S������݆�ٶȵ����ӣ��������݆�D(zhu��n)�ٲ���̫�졣���Ĝp�ٱȿ��ԏ�70~500�������_��һ���dz���Ĝp�ٱȡ����õ����ľ������ڙC���˵����D(zhu��n)���C���˵ĸ첲�P(gu��n)��(ji��)�ϡ�߀���Բ�ȡһЩ���^�����Ė|���������f������Ļ��������ı������ȷdz��ߣ�����ŷ�늙Cʹ�á��ŷ�늙C�ijɱ�Ҳ�dz��ߡ�һ�������ڙC���˵��P(gu��n)��(ji��)�ϣ��҂��@��̫�Ղ}����ęCе�۾��������҂����a(ch��n)���C���p�ٙC���dz����ȵİѺ���T���겨��������������̫���M�Ђ}�����I(y��)�����ڂ}��(n��i)�ĺ���T�������Cе�ۣ�Ҫ�ȷdz��ߣ�߀Ҫ�m����̫�Ր��ӵğo�՚�h(hu��n)����������������侀�����҂��������I(y��)Ҳ��һ������(zh��n)��
�C���������������l(f��)�����Rɪ�c�����o50������ڰl(f��)����(chu��ng)��ġ��C�����ӵ����c����
1�����ȸߣ����X�ڃɂ�180�Ȍ��Qλ��ͬ�r���ϣ�����X݆�X���`����۷e�X���`��С���������D(zhu��n)���ȵ�Ӱ��^��ƽ�����ɵõ��O�ߵ�λ�þ��Ⱥ����D(zhu��n)���ȡ�
2�����ӱȴμ��C���X݆���ӵĂ��ӱȿ��_��30~500���ҽY(ji��)�����Ρ�
3�����d���������C���������X�c�X������Ľ��|������ͬ�r�����X��(sh��)���^�࣬�����λ��e�d�ɱ��^С�����d�����^����������ʽ�ߡ�
4���w�eС�������p�������ͨ�X݆�b�ã��w�e�������ɴ�ͣ����F(xi��n)С�ͻ��p������
5������Ч�ʸߣ������L��
6������ƽ��(w��n)�o�_������С��
�C���p�ٙC�ڇ�����һ������ļ��g(sh��)�����g(sh��)���A(ch��)�����C�����ӡ������ɲ��l(f��)����������݆������݆�����Y(ji��)��(g��u)�M�ɵĂ��ӡ����l(f��)������ʹ����݆�a(ch��n)��������׃���c����݆��ͬ���f�\�ӡ����F(xi��n)����ӱȣ��cͨ�Üp�����ȣ����ڙC�����P(gu��n)��(ji��)���C���p����Ҫ����Ђ���朶̣��w�eС�����ʴ��|(zh��)���p�����ڿ��Ƶ����c��
�C���p���C��ԭ������(y��ng)��
һ���C���p���C����
�C���X݆�p���C�����������X݆����ԭ���l(f��)չ������һ�N���͜p���C���C���X݆���ӣ����Q�C�����ӣ�������������������a(ch��n)�����ԙCе������f�������\�ӵ�һ�N�����X݆���ӡ�
��������ԭ��
�����l(f��)���������ӕr��݆����݆��(n��i)�D(zhu��n)�ӣ��ͽ�ʹ��݆�������S�аl(f��)��׃�οɿصď���׃�Σ����@�r��݆���X����׃�ε��^�����M�루���ϣ����˳������x����݆���X�g���ڲ��l(f��)�������L�S̎̎����ȫ���ϣ������S������X��̎����ȫ��Ó�_�����l(f��)����ͨ���əE�A�ε�݆����݆�b�뱡���S�Ѓ�(n��i)���ٌ������b����݆��(n��i)���˕r��݆��ԭ���ĈA�ζ�׃�əE�A�Σ��E�A�L�S�ɶ˵���݆�c֮��ϵĄ�݆�X�t̎����ȫ���Ϡ�B(t��i)������݆�����X�c��݆�ă�(n��i)�X���X�߇��ϡ��@�LJ��υ^(q��)��һ����30%���ҵ��X̎�ڇ��Ϡ�B(t��i)���E�A���S�ɶ˵���݆�X�c��݆�X̎����ȫÓ�_��B(t��i)�����QÓ�_���ڲ��l(f��)�����L�S�Ͷ��S֮�g����݆�X������݆���L�IJ�ͬ�^(q��)��(n��i)���е���u�˳���݆�X�g��̎�ڰ�Ó�_��B(t��i)���Q֮�釧����
���l(f��)��������݆��(n��i)�D(zhu��n)�ӕr����ʹ��݆�a(ch��n)���B�m(x��)�ď���׃�Σ��˕r���l(f��)�������B�m(x��)�D(zhu��n)�ӣ���ʹ��݆�X�ć��롪���ϡ�������Ó�_�@�ķN��B(t��i)ѭ�h(hu��n)����(f��)����ظ�׃����ԭ���ć��Ϡ�B(t��i)���@�N�F(xi��n)��Q֮�e�X�\�ӣ������@һ�e�X�\�ӣ�����p�����ͿɌ�ݔ��ĸ����D(zhu��n)��׃?y��u)�ݔ���ĵ����D(zhu��n)�ӡ������p���l(f��)�������C���X݆���ӣ������l(f��)����형r��D(zhu��n)��1/8�ܕr����݆�X�c��݆�X����ԭ���ć����B(t��i)���ɇ��Ϡ�B(t��i)����ԭ��Ó�_��B(t��i)�ͳɞ釧���B(t��i)��ͬ�ӵ���������׃?y��u)�Ó�_������׃?y��u)釧�����@����݆������݆�D(zhu��n)�ӣ���λ�ƣ���1/4�X��ͬ�������l(f��)�������D(zhu��n)��1/8�ܕr���؏�(f��)�����^�̣��@�r��݆λ��һ���X�ࡣ������ƣ����l(f��)����������݆�D(zhu��n)��һ�ܕr����݆������݆��λ�ƞ�ɂ��X�ࡣ��݆�X�̈́�݆�X�ڹ�(ji��)�A̎�����^�̾���ͬ�ɂ����L�ӟo���ӣ��ĈA�h(hu��n)һ�ӣ��������κ�˲�g���ڹ�(ji��)�A���D(zhu��n)�^�Ļ��L�����ȡ�������݆�Ȅ�݆�ڹ�(ji��)�A���L�����˃ɂ��X�࣬������݆�ڇ����^���У��ͱ��������݆�D(zhu��n)�^�ɂ��X��Ľ�λ�ƣ��@����λ�����ǜp����ݔ���S���D(zhu��n)�ӣ��Ķ����F(xi��n)�˜p�ٵ�Ŀ�ġ�
�C���p�ٙC��һ�N���͵ęCе����׃�ٙC��(g��u)���c��ͨ�X݆������Ⱦ����w�eС�������p���Y(ji��)��(g��u)���Σ����ӱȷ������μ����ӱȞ�40~350���༉���ӱȿ��_��1600-100000��������Ч�ʸߣ����μ�����Ч��N���ڵ���85%�������Ӿ��ȸߣ����d�����������c���ɏV�����ں��졢���ա����I(y��)�C���ˡ��C�����M�o��ͨӍ�O(sh��)�䣬�����Cе�����w�Cе���켈�Cе���l(f��)�әC��(g��u)��ӡˢ�Cе��ʳƷ�Cе���t(y��)����е���I(l��ng)���^�F(xi��n)��RV�p�ٙC�ֱ��C���p�ٙCҪ���ñ��ˡ�
| 
