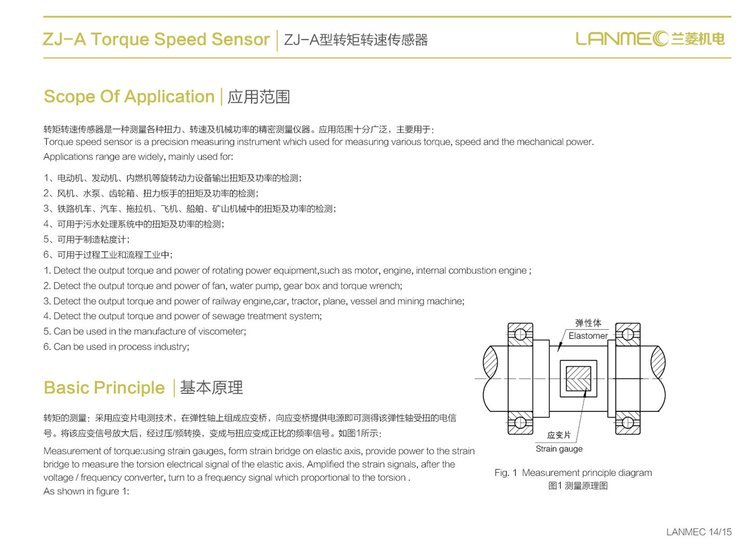
Ť�������Dz��Ñ�׃Ƭ늜y���g ,�ڏ����S�ϽM�ɑ�׃��,��׃���ṩ�Դ���ɜy��ԓ�����S��Ť�����̖����ԓ��׃��̖�Ŵ���^��/�l�D�Q��׃���cŤ��׃�����ȵ��l����̖��ԓ���������Ծ��_�y�����NŤ�����D�ټ��Cе���ʡ�
Ť������Ҳ������������Ť�����������D���������֞�ӑB���o�B�ɴ�����ЄӑB�D�������ֽ����D���D�ق��������ǽ��|Ť��������Ť���������Á��M�аl�әC�p�ٙC�����D���y�����e���҂�ƽ���õ�������܇���ɷ֞�ȼ����܇��늄���܇����������ͨ�^�l�әC����늳�ݔ�����ʣ�׃�����D��������ݔ�ͣ���ͨ�^׃����p����Ť�������Ĝyԇ�_��������ؓ�d���@ʾ�ӑBŤ���������x��ӛ䛃x���l�әC���M�ɡ�ͨ�^����������̖���͵��ӑBŤ���������棬�҂��D������������DYN200�����@ʾ����Ť��04107N.m����:068.80KW�D�٣�597RPM���D���D�ٹ��ʌ��rͨ�^�@ʾ���@ʾ�����Á��M�аl�әC�p���������D���y����
�䌍Ť�صĜy���y�����҂������Б��õ��Ƿdz���ģ��҂��eһ�����εıȷ����҂�ƽ�����ڃ�ͯ�_�l������ħ����������һ����6���棬ÿ���������ͬ���ɫ���҂�Ҫͨ�^������6�N��y���ɫ�M��ͨ�^���Dƴ�ӳ�ÿһ����ɫ����ɽyһ�ġ�������ߵ����a�S�ң������aħ���ĕr����Ҫ���]���҂����ܱ���ͯ�ж���������ʹ���^�����p���M�����D�ĕr����Ҫ���˶��������@��Ť���Ĵ�С���Ϳ����õ�Ť���������M�Мy����
��Ȼ�y��ħ��ʹ�õ�Ť����һ�ׇ���ķ������҂�����Ҫ����һ�����z��ģ�ߣ���һ��һ���ɂ��քe���ң��̶���ħ�������҃ɂȣ�Ȼ���M�зքe�M��ǰ�����ҵ����D�r����ʹ�õ�����ͨ�^�@ʾ���@ʾ���������ж�������w���̌Wԭ�����Լ�С���������Ĵ�С���@���nj���ͯħ��������һ����Փ���������õ�Ť���������ŕ��������ϸ�ĮaƷ��

Ť���������c��
1. �D���D�لӑB�y������늼���̖�ǽ��|���f��ݔ����̖���ֻ���
2. �z�y���ȸߡ������Ժá����ɔ_�ԏ���
3.���跴���{�㼴���B�m�y�������DŤ�ء�
4.�ȿɜy���oֹŤ�أ�Ҳ�ɜy���ӑBŤ�ء�
5.��Ó�x���x������ʹ�ã�ݔ����̖�ɹ�PLC��PCֱ��ʹ�á�
6.�ɸ����͑�Ҫ��ǘ˶��ơ�
Ť��������Ҫ���ܼ�����ָ�� ��
Ť��ʾֵ�`��(Torque indication error)�� ���� 0.2 % F �� S
�`���� (Sensitivity)�� 1��0.2 mv / V
�Ǿ���(Nonlinear)�� �ܡ�0.2 % F��S
�؏���(Repeatability)�� �ܡ�0.2% F��S
����(Lag)�� ��0.2 % F��S
���c�h�ƣ�24С�r��Zero drift (24 hours) �� ��0.1 % F��S
ݔ���迹(Output impedance)�� 1K�� ��3��
�^���迹(Insulation resistance)�� >500M��
�o�B���d(Static overload)�� 150 %
����ؓ�d(Breaking load)�� 200 %

�Դ늉�(Power supply voltage)��DC��15V��5% ,DC 24V(���x optional)
�D��ݔ����̖��60-2000���}�_/�D(���x) Speed output signal: 60-2000 pulse / turn(optional)
���D���l��ݔ��( Zero torque frequency output)��10KHZ
�����D�؝M�����l��ݔ��(Positive torque full scale frequency output )��15KHZ
�����D�؝M�����l��ݔ��(Reverse torque full scale frequency output )��5KHZ
��̖ռ�ձ�(Signal duty ratio)�� ��50��10��%
����������(Power consumption of the sensor)�� 4W
ʹ�Üض�(Temperature when use)�� -20 �� 70��
�������(Relative humidity)�� ��90%RH
��̖ݔ����10��5KHz (���x4~20mA,0~5V,0~10V��̖ݔ�� / 485ͨӍ,ͨ�Ņf�hҊP12)
Signal output: 10��5KHz(Optional 4 ~ 20mA, 0 ~ 5V, 0 ~ 10V signal output / 485 communication, communication agreement pls. see P12)
���̷����� 0.01N•m~2000K N•m�����Էǘ˶��� Measurement range: 0.01~2000K N•m Non-standard can customization.
���^�B�Ӽ��������x
���˰�ȫ��Ҋ�������������������փ��е��f���M�в��������⣬��ʹ���б���������P���õ�
���ɺͰ�ȫ�Ļ���Ҫ�������ʹ��Ҳ����ˡ�
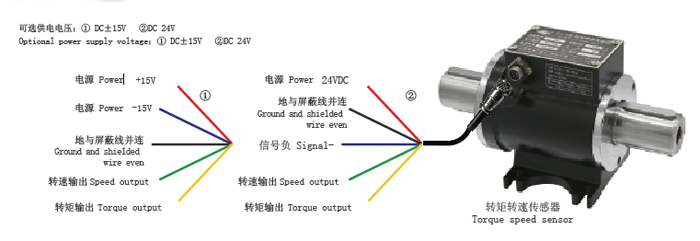
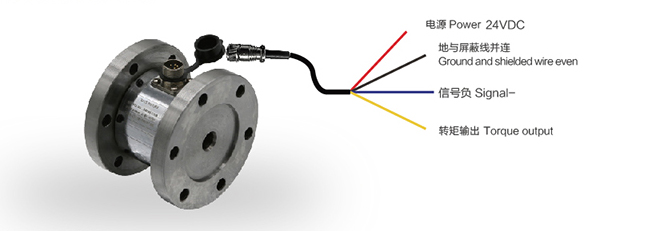
���x���늉���1��DC+15V 2�� DC 24V optional power supply voltage:1,dc+15V 2,DC 24V
�Դpower+15V �Դpower-15V
���c���β��B Ground and shielded wire even �D��ݔ��Speed output �D��ݔ��Torque output
�ԴPower 24VDC ���c���ξ����B Ground and shielded wire even
��̖ؓSignal �D��ݔ�� Speed output �D��ݔ�� Torque output
In the interests of safety, the transducer should only be operated as described in the
Operating Manual. It is also essential to comply with the legal and safety requirements for
the application concerned during use. The same applies to the use of accessories.
ԓ��������ָ����;�����x���沢����һ����ȫ��Ԫ�������_�Ұ�ȫ�ز����˂�������Ҫ�����
�\ݔ�����_�ă��桢�M�b�����b���Լ��м��IJ�����
The torque speed sensor is not a safety element within the meaning of its designated
use. Proper and safe operation of this transducer requires proper transportation, correct
storage, assembly and mounting, and careful operation.
δ�����ذ�ȫ�f����һ��Σ�U General dangers of failing to follow the safety instructions
��������Ŀǰ�Ĺ�ˇˮƽ���������ǹ����Ԅӱ��U�ġ�������������b����������δ����Ӗ����
�T�����������ܕ������ڵ�Σ�U��
The transducer corresponds to the state of the art and is failsafe. The torque speed
sensor can give rise to remaining dangers if it is inappropriately installed and operated by
untrained personnel.
�κ��漰���b�����ӡ��S�o���������������һ���ѽ���x�������˲����փԣ��e�Ǽ��g��ȫ�f
����
Everyone involved with mounting, starting up, maintaining, or repairing the torque speed
sensor must have read and understood the Operating Manual and in particular the technical
safety instruction.
�����U Residual dangers
�����������ܺ�ʹ�÷����ڑ����ЃH�漰һС���ֵ�Ť�y�����g�����⣬�O��Ҏ���ˆT�����b
�ˆT�Ͳ����ˆT��Ӌ������ʩ�Ԝp�ٝ���Σ�U�ķ�ʽ����Ť�y�����g�İ�ȫ���̵��뷨�����ؑ���
���ʼ�K���جF���O�ܡ�����ἰ�cŤ�y�����g���P�ĝ���Σ�U��
The scope of supply and performance of the torque speed sensor covers only a small
area of torque measurement technology. In addition, equipment planners, installers and
operators should plan, implement and respond to the safety engineering considerations of
torque measurement technology in such a way as to minimize remaining dangers. On-site
regulations must be complied with at all times. Reference must be made to remaining
dangers connected with torque measurement technology.


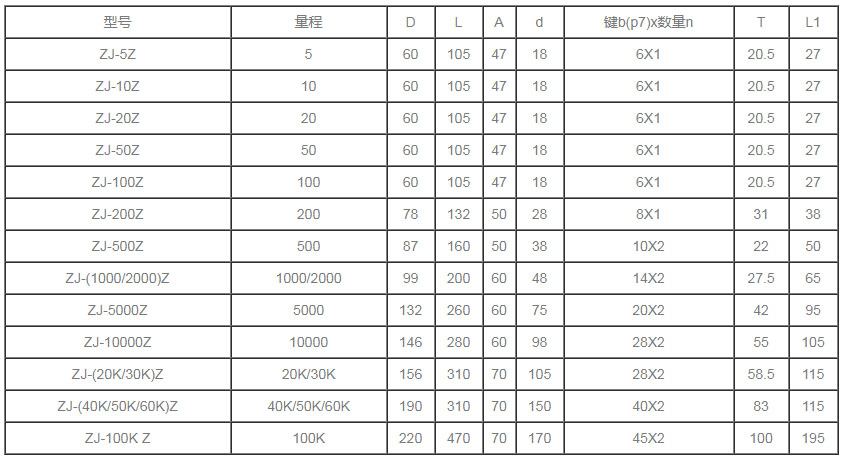
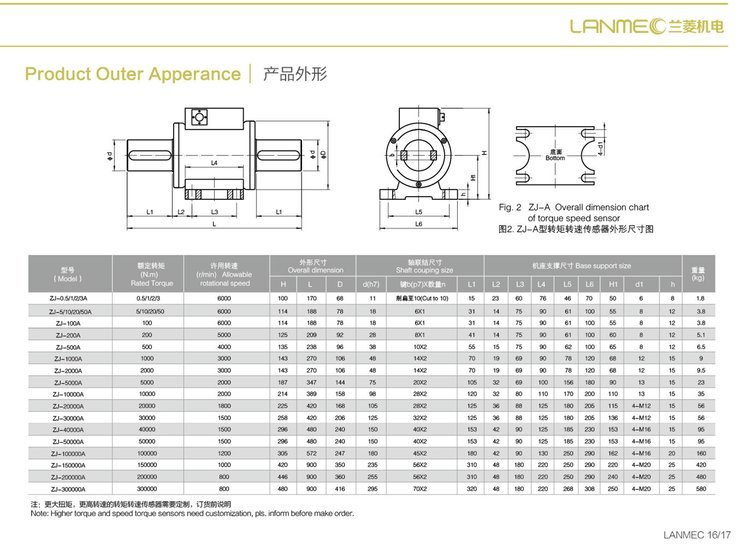
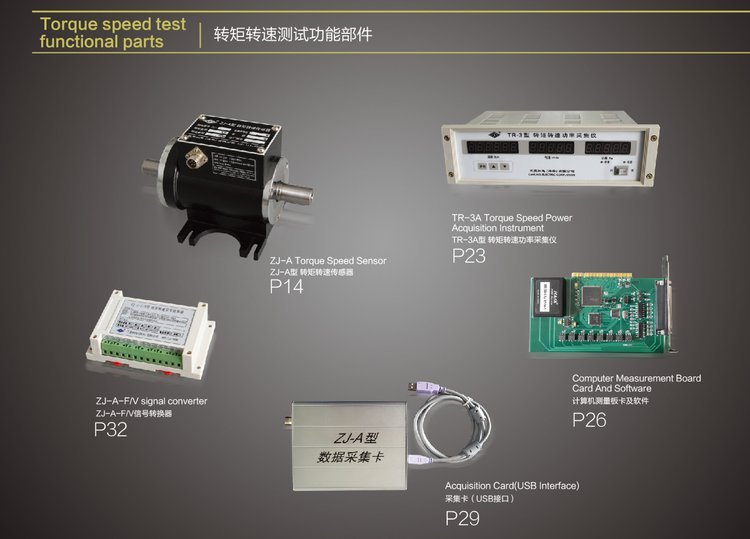
ZJ-AP�ͱPʽŤ������ݔ�롢ݔ���˶����÷��m�ӷ�ʽ������һ�˱�횄����ӣ�������ԓ��̖��������ʹ���S�У�����Ч�ر������S�аl��a���Ĝy���`��m���ڸ������D��Ҫ���S��ߴ���̵Ĉ���ʹ�á�
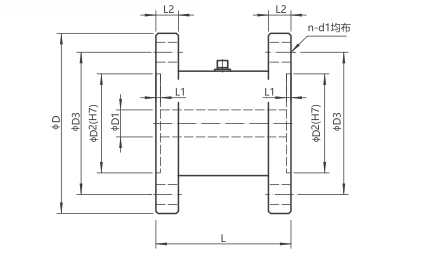
Ť���������ΰ��b�ߴ�D
|
��̖
|
����
|
L
|
H
|
H1
|
D1
|
D2
|
n-d1x���
|
L1
|
L2
|
L3
|
L4
|
L5
|
L6
|
d2
|
h
|
|
ZJ-5/10/20/50AP
|
5/10/20/50
|
60
|
171
|
100
|
52
|
66
|
6-M6X10
|
2
|
2
|
115
|
140
|
30
|
48
|
7
|
12
|
|
ZJ-100/200AP
|
100/200
|
60
|
171
|
100
|
52
|
66
|
6-M6X10
|
2
|
2
|
115
|
140
|
30
|
48
|
7
|
12
|
|
ZJ-500AP
|
500
|
70
|
200
|
120
|
62
|
76
|
6-M8X12
|
3
|
3
|
135
|
160
|
40
|
58
|
9
|
15
|
|
ZJ-1000AP
|
1000
|
70
|
220
|
130
|
72
|
96
|
8-M10X12
|
3
|
3
|
155
|
180
|
36
|
58
|
11
|
15
|
|
ZJ-2000AP
|
2000
|
70
|
220
|
130
|
72
|
96
|
8-M10X16
|
3
|
3
|
155
|
180
|
36
|
58
|
11
|
15
|
����5000~2000K N•m ���������ȡ Call for 5000 ~ 2000K N•m parameters
��̖ݔ���c��̖�ɼ�
1��Ť����̖ݔ��������ʽ��
�PʽŤ���������x��
�� ������̖���}�_��̖��
�� �ɸ����Ñ���Ҫ�Ƴ�늉�ģ�M��̖ݔ�������ģ�M��̖ݔ���������oֹŤ�y������
2��Ť����̖̎����ʽ��
�� Ť������ݔ�����l����̖�͵��l��Ӌ���ֱ���ֱ���xȡ�cŤ�س����ȵ��l����̖��늉��������̖��
�� Ť��������Ť���c�l����̖�ͽo��Ƭ�C���x����ֱ���@ʾ���rŤ��ֵ���D�ټ�ݔ������ֵ�� RS232ͨӍ��̖��
�� ֱ�ӌ�Ť���c�D�ٵ��l����̖�ͽoӋ��C�� PLD�M��̎����
ZJ-Z���Sʽ�o�BŤ�������V��������ԇ�C��Ť�����֡��D��C���S�С�늄ӈ��������y�T��Һ�����oֹŤ�yԇϵ�y�У����ڳ�ɫ�ķ����ԡ��^�ߵĜy�����Ⱥ͘O�ߵ��ԃr�ȶ��ܵ��Ñ�����A��
���gָ�ˣ�
1.�l��푑�100��s
2.�^�����ȣ�200M����100V��
3.��늣�DC12~24V �����50mA
4.ݔ����̖�����4~20mA,늉�1~5V,
�l�ʷ���10KHz/��5 KHz�����x��
5.Ť���������裺1000��
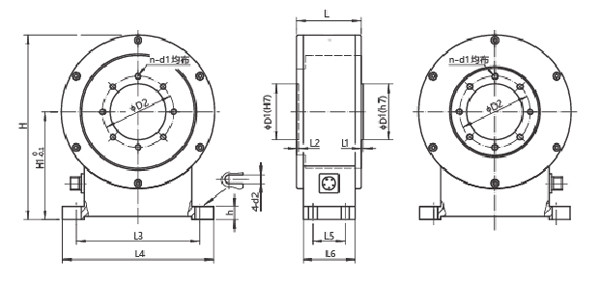
���ΰ��b�ߴ�D
����200K~2000K N•m ���������ȡ �ɷǘ˶���
Ť��������;�c���c
�m���c�o�B�����B�m���D��Ť����ֵ�Ĝy���c����
���̣�1000��2000��3000��5000N.m
���g������
|
�~���d��
|
1000��5000N.m
|
|
�C�Ͼ���
|
0.1��0.3��0.5��������+����+�؏��ԣ�
|
|
�`����
|
1.0��2.0mV/V
|
|
��׃
|
��0.05%F��S/30min
|
|
���cݔ��
|
��2��%F��S
|
|
���c�ض�Ӱ�
|
��0.05%��F��S/10��
|
|
ݔ���ض�Ӱ�
|
��0.05%F��S/10��
|
|
�����ض�
|
-20�桫+65��
|
|
ݔ���迹
|
750��15 �� �� 380��10 ��
|
|
ݔ���迹
|
700��5 �� �� 350��3 ��
|
|
�^�����
|
��5000��M��
|
|
��ȫ�^�d
|
120% F��S
|
|
����늉�
|
���h10VDC
|
|
���|
|
�Ͻ��
|
|
�Ӿ���ʽ
|
ݔ��+���t ݔ��-����
|
|
|
ݔ��+���G ݔ��-����
|
ZJ-FZ�ͷ��mʽ�o�BŤ���������V��������ԇ�C��Ť�����֡��D��C��늄ӈ��������y�T��Һ�����oֹŤ�yԇϵ�y�У����ڳ�ɫ�ķ����ԡ��^�ߵĜy�����Ⱥ͘O�ߵ��ԃr�ȶ��ܵ��Ñ�����A��
Ť���������gָ��
1.�l��푑�100��s
2.�^�����ȣ�200M����100V��
3.��늣�DC12~24V �����50mA
4.ݔ����̖�����4~20mA,늉�1~5V,
�l�ʷ���10KHz/��5 KHz�����x��
5.Ť���������裺1000��
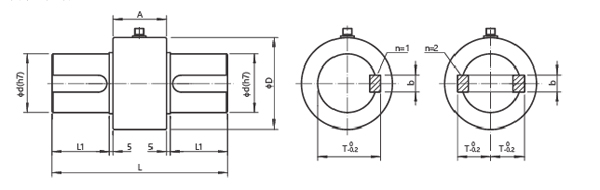
���ΰ��b�ߴ�D
|
��̖
|
����
|
L
|
D
|
D1
|
D2
|
D3
|
n-d1
|
|
ZJ-5FZ
|
5
|
60
|
80
|
10
|
46
|
65
|
6-M8
|
|
ZJ-10FZ
|
10
|
60
|
80
|
10
|
46
|
65
|
6-M8
|
|
ZJ-20FZ
|
20
|
60
|
80
|
10
|
46
|
65
|
6-M8
|
|
ZJ-50FZ
|
50
|
60
|
80
|
10
|
46
|
65
|
6-M8
|
|
ZJ-100FZ
|
100
|
60
|
80
|
10
|
46
|
65
|
6-M8
|
|
ZJ-(200/300/400/500)FZ
|
200/300/400/500
|
70
|
100
|
16
|
62
|
82
|
6-M10
|
|
ZJ-(1000/2000)FZ
|
1000/2000
|
75
|
116
|
20
|
72
|
94
|
6-M12
|
|
ZJ-5000FZ
|
5000
|
85
|
165
|
25
|
115
|
142
|
8-M12
|
|
ZJ-10000FZ
|
10000
|
95
|
205
|
40
|
135
|
173
|
8-M18
|
|
ZJ-(20K/30K)FZ
|
20K/30K
|
115
|
245
|
50
|
155
|
205
|
8-M20
|
|
ZJ-(40K/50K/60K)FZ
|
40K/50K/60K
|
120
|
280
|
50
|
200
|
240
|
10-M20
|
|
ZJ-100KFZ
|
100K
|
150
|
318
|
50
|
230
|
274
|
10-M24
|
����200K~2000K N•m���������ȡ���ɷǘ˶��ơ�




�Ұ���֪���������_�����@��λ�������Ѓɂ��������������@��Ҳ�Ѓɂ�360�ǶȂ�������Ո��ҿ��ɂ�������������X݆���д��Եģ�Ҳ���ǃɉK���F����һ���X݆��ƫ�ĵģ����D���@���X݆�ĕr������Ĵ��F��ƫ�ĵģ�����һ������������̖����ռ�ձȷ�ʽ���M��ݔ�ͽo��X�ģ��@�����ε�Ť��������ԭ��D�ѽ��������ˣ��Դ��������Դ�ؾ����ɗl��̖ݔ����ݔ���o��X����8�l�����ɂ�5V,4����̖�����ɂ��ؾ����քe�o�@�ɂ��������M�й�늺ʹ��F���ȕ��o��ͨ늜yԇһ��������̖����ô׃�� �ģ������@�ɂ��ط����˃ɂ���݁��M�ОV������������ăɂ��Դ�����з������s�����x�yԇ360�ǶȂ���������������̖����ô׃���ģ�ֱ����ʾ�������F����ʾ����ȥ�yԇһ�ɂ�������������̖늉���׃�������g�ăɂ�����̖�����F����һ���˜ʵķ�����������һ�����s�����������ҵ��Դ���Ǻܷ������@߅Ҳ��һ���˜ʵķ������ҬF��ȥ�D��һ���@���X݆����һ�����IJ���׃������ʾ�������Կ������@�ɂ�������������̖һ���˜ʵķ�����ʽݔ�ͽo��X���ٜyԇ����һ�����������ҵĽ����Ǚz�y����ǰ�������߀���Ҵ���ģ�Ҳ���@��ʾ�������ĵIJ��Σ�����һ���˲��ò�����ֻ�ܺ��εĿ�һ�£��@��߅������̖���@���@�����ε�늉����෴�ģ��������f�ҽo��ͨ���Դ�Ժ�ȥ�y��������̖���ĕr������ĸ�������@���������ĕr�������ɂ�֮�g����̖늉�׃�����෴�ģ�һ�����������ģ�һ�����������ġ��Һ��εĮ���늉�׃���ĈD�����o�B�]�д������r�£��ɾ���̖�����1.6�����ң�����f�������ĕr�����f��̖1����̖늉���������̖2����̖늉��˾������½�����ô���Ҵ���ĕr���ˣ���̖1����̖늉������½��ģ���̖2����̖늉����������ģ����� �ɂ���̖늉�֮�g��߉�Pϵ�����@�ӵģ����w������̖늉��Ƕ��٣�ֻ��ȥ���εĜy��һ�£��F����������D��ϵ�y�@һ�KҲ���о����@�
�Д��Cе���غ�ķ����c�l����
��ֻ�����������ɏ����������r�����w�Ą��ܺ��������ܣ����Ԅ��ܣ��l����D�������係�ͱ��ֲ�׃���@���YՓ�Q���Cе���غ㶨�����Д��Cе���غ�ķ���һ���ЃɷN��
��1�������Cе���غ�ėl���Дࡣ�������w��ϵ�y���ܵ������Д�������������������ǃ���߀���������Ƿ����w�������������������������w��ϵ�y���˹����t���w��ϵ�y�ęCе�ܲ��غ㣬��t�Cе���غ㡣
��2���Cе�������D���Дࡣ����һ�����w��ϵ�y�������Ƿ�ֻ���ڄ��ܺ��������ܣ����Ԅ��ܣ�����D�������ֻ���ڄ��ܺ��������ܣ����Ԅ��ܣ�����D�����������ڙCе�ܺ�������ʽ���������D�����Cе���غ㣬��t�Cе�ܲ��غ㡣
ͬ�W���ڌW���Cе���غ���^���У����ڌ��غ�l�������ⲻ����̣��������FһЩ�e�`���J�R������̓ɷN��Ҋ�e�`�J�R�M�з�����
�e�`�J�Rһ�����w���ܵĺ�����������r�����w�ęCе��һ�����غ㡣
�������@�N�f���������Cе���غ�ėl�������������ɏ�������������������������Ǻ��������㡣����С�����������w�^���У��H���������ã������������㣬���\���^����ֻ���������������ϙCе���غ㶨�ɵėl����
�e�`�J�R����ֻҪ�Cе�ܵĿ�����׃��Ҳ���ǙCе���غ㡣
�������@�N�f��Ҳ�Dz����_�ġ��Cе���غ�ėl����ֻ���ڄ��ܺ��������ܣ����Ԅ��ܣ�����D�����������ڙCе�ܺ�������ʽ���������D��������������һ���wǡ�ÿ˷�б��Ħ������б������»����������ӣ��������ܜp�٣��Cе�ܿ������ֲ�׃�������������\���^���У��Ĺ��ĽǶȷ�������������߀���˵�������Ħ���������w�������������ϙCе���غ�ėl������������D���ĽǶȷ��������˙Cе����߀���˵Ļ��W�ܼ���Ħ�����a���ă��܅��c�D�����ʴ��^�̲����ϙCе���غ�ėl����
���������P�ڙCе���Ƿ��غ�Ĕ������_���ǣ�BD��
A. ������ֱ���\�ӵ����w�Cе��һ���غ�
B. ����׃��ֱ���\�ӵ����w�Cе�ܿ����غ�
C. �����������w��������r���Cе��һ���غ�
D. ֻ�����������w���������w�Cе��һ���غ�
��������A��C�x헣�������ֱ���\�ӵ����w���������������㣩���������������⣬����߀���������������罵����ڿ��Є����½��r���������������⣬�՚�����Ҳ����������������ԙCе�ܲ��غ㣬��A��C�x����e�`�ġ�
B�x�������׃��ֱ���\�ӵ����w����ֻ��������ֻ���������������������w�\�ӣ����w�Cе���غ㡣��B�x������_�ġ�
D�x헷��ϙCе���غ�ėl�������Ա��}�����_�𰸑���BD.
�C���������҂��ھ��w�Д��Cе���Ƿ��غ�r��һ������ɷ��濼�]��
һ���������ĽǶȿ��]
�ٌ���һ�����w����ֻ�����������������������������tԓ���w�ęCе���غ㡣
�ڌ����Ƀɂ���ɂ��������w�����������ڃȽM�ɵ�ϵ�y�������ϵ�yֻ���������������������tϵ�y�ęCе���غ㡣
�����������D���ĽǶȿ��]
���w�gֻ�Є��ܡ��������ܺ͏��Ԅ���֮�g����D����ϵ�y�c���]�ЙCе�ܵ��D�ƣ�ϵ�y�Ȳ��]�ЙCе���c������ʽ�ܵ��D�����tϵ�y�ęCе���غ㡣
Ť�y���V����������܇�����գ����죬��ģ���������܇����Դ�����ȵȸ������I�I�����_���M��Ť�y���ǮaƷ�аl���ܙz�y����B�O�y�Ԅӿ��ƣ����܄���ƽ��ָʾ�ı��C�������f�����҂��́���һ��Ť�y�������P���g֧�֡�
�҂��ȁ���һ��Ť�صĶ��x��Ť�ؾ���ʹ�Cе�����a���D��Ч���������SŤ�D׃�ε������������أ�Ҳ�����D�أ���λ��ţ�ף��D�ط�̖�����������������t�_���ģ�Ҳ�����f������ִ�Ĵָ��ָ�ķ�����Ť�صķ�������Ť��ʸ���҂�Ҏ��������ָ���c�����λ��������һ�µĕr������������������ؓ��Ť������ż�����ɷN���F��ʽ�����ؾ����҂��ڸ��������������W��������ʹ���w�@���D���S������֧�c�D�ӵ�څ�����Ĺ�ʽ�������ص������������ۡ�
�nj�����ż�������ڄ��w�ϵ�һ����С��������෴����ż�����صı��_ʽ�mȻ����ͬ�ģ��������������Ѕ^�e�ģ���ż�Č�����������µ����îa�����Ǵ����֣������ǘ�����߅�������ஔ���R����F1Ʋ��6fl�ďͺ�����Ч�����������o����F1Ʋ���������ܵ��������ã�ʹ���S��Ħ���������ӣ��ڌ��H�������҂������F���˶��ĕr�ܶ��˼Ҳ�����*���۷�ʽ���@�N��ʽ�أ��͕��a���������͏��صĆ��}���������D�Cе�҂������@�Ӄɂ���ʽ��һ��������Ť������D�ӑT�����ԽǼ��ٶȣ�����һ������Ť�ص���9.55���ʳ����D�٣����˴�Ҹ��õ�����Ť���@Щ��ʽ���Ҍ����W��������P�Ķ��ɽo��ҏ���һ�¡�
ţ�D�������ɣ���ţ�D�ĵ�һ���ɣ����Ǹ�׃���w�\�Ӡ�B��ԭ��Ҳ�����f���w�ڛ]���ܵ��������Ǻ�����0�ĕr���DZ��ք���ֱ���\�ӻ����oֹ��B���nj�����Ť���@һ�K�����������w�ڛ]���ܵ�Ť�ص������ǻ�����Ť�؞�0�ĕr��ͣ����DZ��ք������D�������oֹ��B��
ţ�D�ڶ������v���������w���|�����ٶȵ��Pϵ��Ҳ�����fF=ma�nj�����Ť���@����Ť�ص����D�ӑT�����ԽǼ��ٶȡ�
ţ�D�����������v���������w�g������ã�Ҳ�����f�ɂ����w֮�g���������ͷ�������������ͬ�r��һ�lֱ���ϣ���С��ȣ������෴��
�҂�Ť�y�������һ�N��������Ť�y�����Dz��õ��@�Nԭ�����҂����� �������چ�Ť�������y��������Ť�ء�ؓ�dŤ��߀������ʲôŤ�أ����@���Ҿ�����һ��������ģ�ͣ���M0���Ǿͷքe������ƽ������cؓ�d�����@�����������ஔ���҂���Ť���������҂����ý��淨���ԁ��M�з������������@���Sϵ�֞������҃ɂȣ����҃ɂȷքe��Y6M0�̓�6T��T1Ʋ��ƽ�ⷽʽ��֪TƲ�ǵ���M0=T�ġ�����أ�T��TƲ��ͬһ�����ϵă�����������ԓ����ͬ�Ĵ�С����ؓ�ģ�������T��TƲ�ķ����҂������������������t���_�����҂����Կ���������҂���ֱָ��T���@���������҂��Ĵ�Ĵָָ���������@�r���أ�����Ť��ʸ����ָ�����Խ������h��������һ�µģ������f�@�r���������ģ���������Ҳͬ�ӵģ��҂���ָָ������Ť�ؼ��d�ķ����ô�Ĵָ��ָ����ȵģ�ͬ����Ҳ��ָ���˽����Y�����ķ��������f��Ҳ�����ģ����Ͼͽ�����҂���ʲô�f��һ����������Կ������������������c��Ť�أ����ڌ��H�������҂�Ҫ���]�������Sϵ���|�������҂�����˼��һ�£������҂���Ҫ�y��̓��Ť���v��Ť��������ԓ���b�ڸ������ӂ�߀��ؓ�d�ȣ�
���˸��õ����������淨�����ҁ���һ��Ť�؈D����Ť�؈D������ƽ���ڗU�S�������ˣ�X��ʾ�����λ�ã��Դ�ֱ��X�S�����˽����ʾ��ǰ���о����@���D�ҽo����һ������ϵ�y��һ������ģ�ͣ���һ���ؕ�ֱ�ӽo�������D��ֵ�����҂����˺��������һ���������nj����@���D��Ť�؈D��ô�����أ��Y�������@�ӡ��҂�ȡ��˞酢����헣������еĽ����҂�Ҳ����ȵĽ���������҂���ab���҂����Կ������҂����Կ���ab�εă���ż��10ǧţ�ף��nj���BC���҂����Կ���BC�εă���ż��10+10=20������CD�Σ������ă���ż��10+10-40=-20ǧţ�ף�ͬ������҂����҂�ȥ����Ԓ���҂����Եó�ͬ�ӵĽY����
| 
